模块开发
3 模块开发
3.1 模块体系结构描述
3.1.1 VFE 框架
• 使用过程中可简单的看成是vfe 模块+ device 模块+af driver + flash 控制模块的方式;
• vfe.c 是驱动的主要功能实现,包括注册/注销、参数读取、与v4l2 上层接口、与各device 的下层接口、中断处理、buffer 申请切换等;
• device 文件夹里面是各个sensor 的器件层实现,一般包括上下电、初始化,各分辨率切换,yuv sensor 包括绝大部分的v4l2 定义的ioctrl 命令的实现;而raw
sensor 的话大部分 ioctrl 命令在vfe 层调用isp 的库实现,少数如曝光/增益调节会透过vfe 层到实际器件层;
• actuator 文件夹内是各种vcm 的驱动;
• flash_light 文件夹内是闪光灯控制接口实现;
• csi 和mipi_csi 为对csi 接口和mipi 接口的控制文件;
• lib 文件夹为isp 的库文件;
• linux-3.0 前的版本相当于vivi.c+csi bsp 层
• linux-3.4 版本支持isp 驱动和双CSI
• linux-3.10 版本将mipi/csi/isp 模块化(由vfe.c 直接调用=>v4l2_subdev_ops), 支持device tree
3.1.2 VIN 框架
• 使用过程中可简单的看成是vin 模块+ device 模块+af driver + flash 控制模块的方式;
• vin.c 是驱动的主要功能实现,包括注册/注销、参数读取、与v4l2 上层接口、与各device 的下层接口、中断处理、buffer 申请切换等;
• modules/sensor 文件夹里面是各个sensor 的器件层实现,一般包括上下电、初始化,各分辨率切换,yuv sensor 包括绝大部分的v4l2 定义的ioctrl 命令的实
现;而raw sensor 的话大部分ioctrl 命令在vin 层调用isp 库实现,少数如曝光/增益调节会透过vin 层到实际器件层;
• modules/actuator 文件夹内是各种vcm 的驱动;
• modules/flash 文件夹内是闪光灯控制接口实现;
• vin-csi 和vin-mipi 为对csi 接口和mipi 接口的控制文件;
• vin-isp 文件夹为isp 的库操作文件;
• vin-video 文件夹内主要是video 设备操作文件;
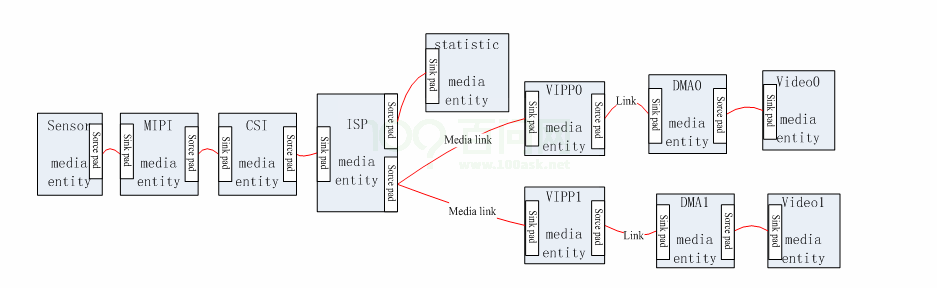
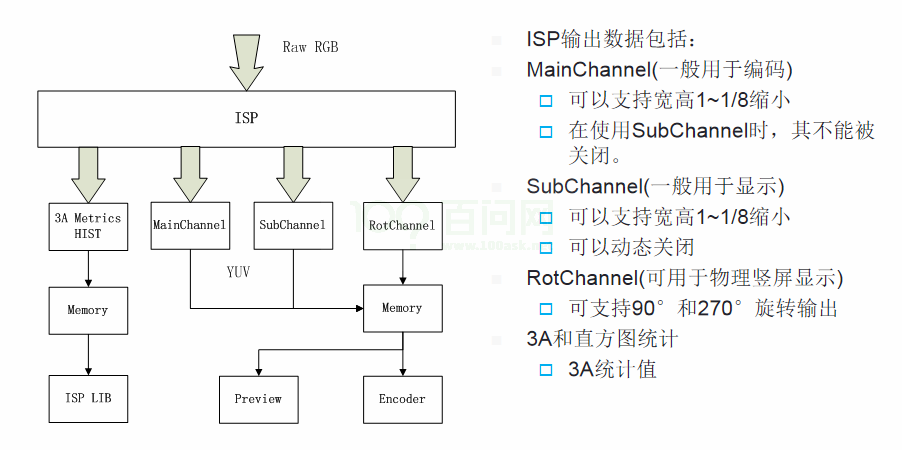
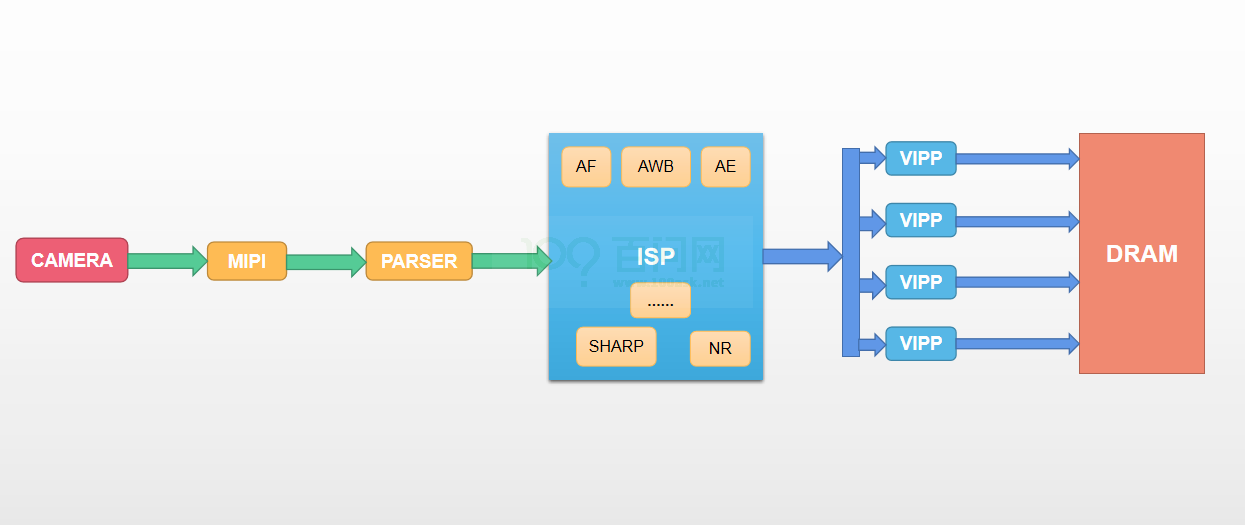
3.1.3 Camera 通路框架
• VIN 支持灵活配置单/双路输入双ISP 多通路输出的规格
• 引入media 框架实现pipeline 管理
• 将libisp 移植到用户空间解决GPL 问题
• 将统计buffer 独立为v4l2 subdev
• 将的scaler(vipp)模块独立为v4l2 subdev
• 将video buffer 修改为mplane 方式,使用户层取图更方便
• 采用v4l2-event 实现事件管理
• 采用v4l2-controls 新特性
3.2 驱动模块实现
3.2.1 硬件部分
检查硬件电源,gpio 是否和原理图一致并且正确连接;检查sys_config.fex 或者board.dts 是否正确配置,包括使用的电源名称和电压,详见CSI 板级配置章节说
明;如果是电源选择有多个源头的请确认板子上的连接正确,比如0ohm 电阻是否正确的焊接为0ohm,NC 的电阻是否有正确断开等等。带补光灯的也需要检查
灯和driver IC 和控制io 是否连好。
3.2.2 内核device 模块驱动
一般调试新模组的话建议以sdk 中的某个现成的驱动为基础修改:YUV 的并口模组以R40 平台(linux3.10) 的ov5640.c 为参考。
下面以ov5640.c 为例说明调试新模组需要注意的两点:
- 添加Makefile
[linux-3.10/drivers/media/platform/sunxi-vfe/device/Makefile]
添加
obj-m + = ov5640.o (详见1)
详注:
1.具体取决于使用的模组,如果是新模组则将驱动代码放置在该device目录下。
- 配置模组参数
配置参数在linux-3.10/drivers/media/platform/sunxi-vfe/device/ov5640.c 中,只需注意下面两个参数。
#define SENSOR_NAME "ov5640" (详见1)
#define I2C_ADDR 0x78 (详见2)
详注:
1.该参数为模组名,必须和sys_config.fex的csi0_dev0_mname或者board.dts的sensor0_mname保持一致。
2.I2C_ADDR可参考相应模组的datasheet,sys_config.fex的csi0_dev0_twi_addr与此值保持一致。
3.2.2.1 驱动宏定义
sensor 输入时钟频率,可查看模组厂提供的sensor datasheet,datasheet 中会有类似inputclock frequency: 6~27 MHz 信息,这个信息说明可提供给sensor 的
MCLK 可以在6 M 到27 M之间。其中MCLK 和使用的寄存器配置强相关,在模组厂提供寄存器配置时,可直接询问当前配置使用的MCLK 频率是多少。
#define VREF_POL V4L2_MBUS_VSYNC_ACTIVE_LOW
#define HREF_POL V4L2_MBUS_HSYNC_ACTIVE_HIGH
#define CLK_POL V4L2_MBUS_PCLK_SAMPLE_RISING
并口sensor 必须填写,MIPI sensor 无需填写,可在sensor 规格书找到,如下
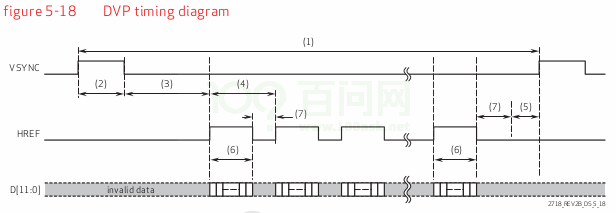
从上述的图像可得到以下信息:
-
VSYNC 在低电平的时候,data pin 输出有效数据,所以VREF_POL 设置为V4L2_MBUS_VSYNC_ACTIVE_即低电平有效;
-
HREF 在高电平的时候,data pin 输出有效数据,所以HREF_POL 设置为V4L2_MBUS_HSYNC_ACTIVE_即高电平有效;
-
CLK_POL 则是表明SOC 是在sensor 输出的pclk 上升沿采集data pin 的数据还是下降沿采集数据,如果sensor 在pclk 上升沿改变data pin 的数据,那么SOC
应该在下降沿采集,CLK_POL 设置为V4L2_MBUS_PCLK_SAMPLE_FALLING;如果sensor在pclk 下降沿改变data pin 的数据,那么SOC 应该在上降沿采集,
CLK_POL 设置为V4L2_MBUS_PCLK_SAMPLE_RISING。
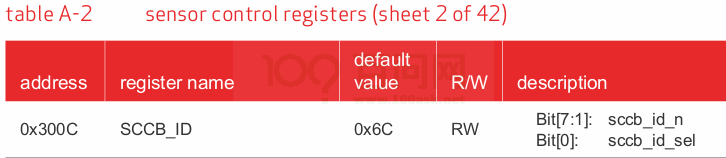
一般填写sensor ID,用于sensor 检测。sensor ID 可在sensor 规格书的找到,如下

sensor I2C 通讯地址,可在sensor 规格书找到,如下
定义驱动名字,与系统其他文件填写的名字要一致,比如需要和sys_config.fex 中的sensorname 一致。
3.2.2.2 初始化代码
static struct regval_list sensor_default_regs[] = {}; /* 填写寄存器代码的公共部分*/
static struct regval_list sensor_XXX_regs[] = {}; /* 填写各模式的寄存器代码,不同的模式可以是分辨率、帧率等*/
上述部分的寄存器配置,公共部分可以忽略,直接在模式代码中配置sensor 即可,相应的寄存器配置,可让模组厂提供。
3.2.2.3 曝光增益接口函数
static int sensor_s_exp(struct v4l2_subdev *sd, unsigned int exp_val) /* 曝光函数*/
static int sensor_s_gain(struct v4l2_subdev *sd, unsigned int gain_val) /* 增益函数*/
AE 是同时控制曝光时间和增益的,所以需要在上面的函数中分别同时sensor 曝光和增益的寄存器。
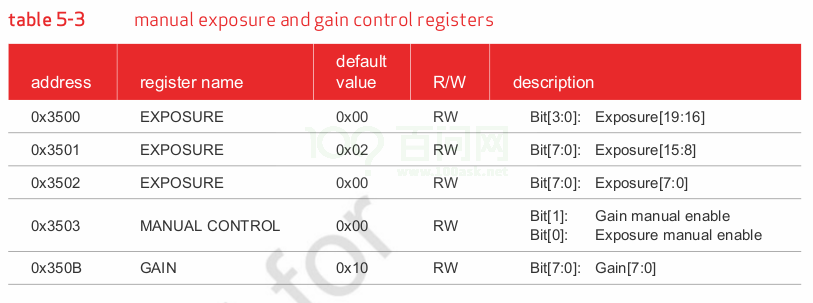
根据规格书中的寄存器说明,在相应的函数配置即可。若设置exp/gain 无效,可能的原因有:
• sensor 寄存器打开了AE;
• 设置值超出了有效范围
具体可根据模组厂提供的配置设置,如若检查之后设置仍失效,可与模组厂沟通,确认配置是否正确。
3.2.2.4 上下电控制函数
控制sensor 上电、下电及进出待机状态,操作步骤须与规格书描述相同,注意power down 和reset pin 的电平变化。
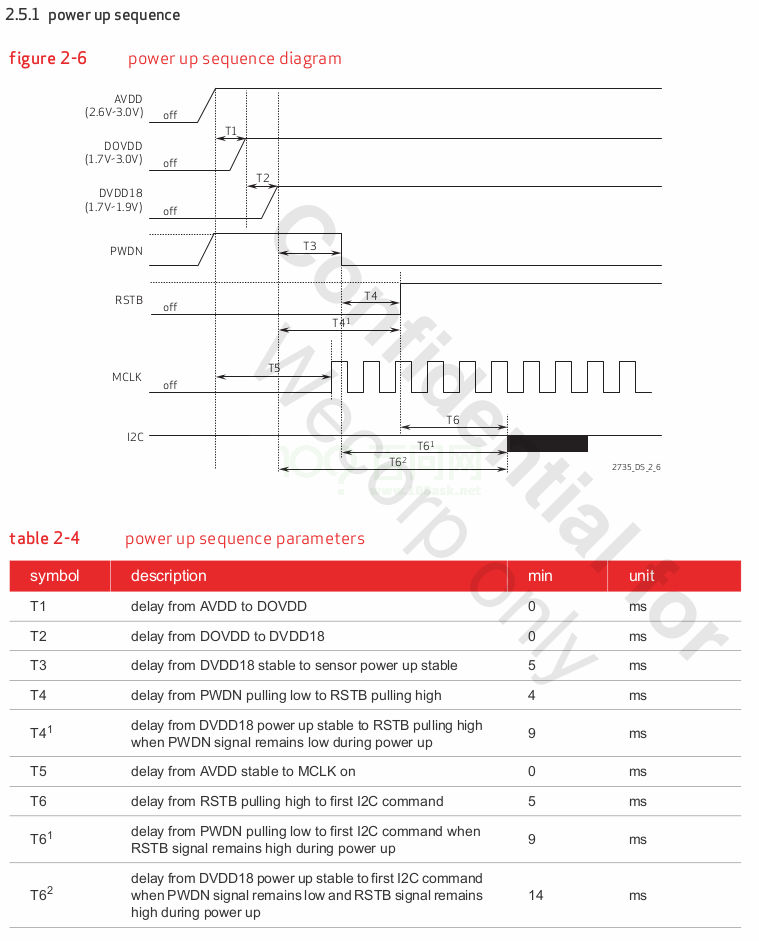
驱动中,按照规格书的上电时序进行配置,而如果上电之后测量硬件并没有相应的电压,这时候 检查硬件和软件配置是否一致。关于csi 电源的配置,操作流程可如下:
- 先通过原理图确认sensor 模组的各路电源是连接到axp 的哪个ldo;
- 查看sys_config.fex 的regulator 配置,在相应的ldo 后增加相应的字段,比如“csi-vdd”等;
- 在sys_config.fex 的csi 部分,sensor 部分的电源后的字段再填写与上述一样的字段即可;
- 根据sensor 规格书的要求,填写相应的电压即可;
以上图为例,确认sensor 驱动中的上电时序。
static int sensor_power(struct v4l2_subdev *sd, int on)
{
int ret;
ret = 0;
switch (on) {
/* STBY_ON 和STBY_OFF 基本不使用,可忽略这两个选项的配置*/
case STBY_ON:
...
break;
case STBY_OFF:
...
break;
/* 上电操作*/
case PWR_ON:
sensor_print("PWR_ON!\n");
cci_lock(sd);
/* 将PWDN、RESET 引脚设置为输出*/
vin_gpio_set_status(sd, PWDN, 1);
vin_gpio_set_status(sd, RESET, 1);
/* 按照上图知道,上电前PWDN、RESET 信号为低,所以将其设置为低电平*/
vin_gpio_write(sd, PWDN, CSI_GPIO_LOW);
vin_gpio_write(sd, RESET, CSI_GPIO_LOW);
/* 延时*/
usleep_range(1000, 1200);
/* CAMERAVDD 为SOC 中的供电电源,部分板子可以忽略该电源,
* 因为有些板子会通过一个vcc-pe 给上拉电阻等供电,所以需要
* 使能该路电,有些是直接和iovdd 共用了,所以有部分会忽略该
* 路电源配置.
*/
vin_set_pmu_channel(sd, CAMERAVDD, ON);
/* 将PWDN 设置为高电平*/
vin_gpio_write(sd, PWDN, CSI_GPIO_HIGH);
/*AF上电*/
vin_set_pmu_channel(sd, AFVDD, ON);
/* AVDD 上电*/
vin_set_pmu_channel(sd, AVDD, ON);
/* 延时,延时时长为T1,T1 的大小在datasheet 的上电时序图下面有标注*/
usleep_range(1000, 1200);
/* DOVDD 上电*/
vin_set_pmu_channel(sd, IOVDD, ON);
/* 延时,按照上电时序中的标注的T2 时间延时*/
usleep_range(1000, 1200);
/* DVDD 上电*/
vin_set_pmu_channel(sd, DVDD, ON);
/* 延时,按照上电时序中的标注的T3 时间延时*/
usleep_range(1000, 1200);
/* 将PWDN 设置为低电平*/
vin_gpio_write(sd, PWDN, CSI_GPIO_LOW);
/* 设置MCLK 频率并使能*/
vin_set_mclk_freq(sd, MCLK);
vin_set_mclk(sd, ON);
/* 延时,按照上电时序中的标注的T4 时间延时*/
usleep_range(1000, 1200);
/* 将RESET 设置为高电平*/
vin_gpio_write(sd, RESET, CSI_GPIO_HIGH);
/* 延时,按照上电时序中的标注的T6 时间延时*/
usleep_range(10000, 12000);
cci_unlock(sd);
break;
/* 掉电操作*/
case PWR_OFF:
sensor_print("PWR_OFF!\n");
cci_lock(sd);
/* 具体的掉电操作同样的按照datasheet 的power off 操作即可*/
vin_gpio_write(sd, PWDN, CSI_GPIO_HIGH);
vin_gpio_write(sd, RESET, CSI_GPIO_LOW);
vin_set_mclk(sd, OFF);
vin_set_pmu_channel(sd, AFVDD, OFF);
vin_set_pmu_channel(sd, AVDD, OFF);
vin_set_pmu_channel(sd, DVDD, OFF);
vin_set_pmu_channel(sd, IOVDD, OFF);
vin_set_pmu_channel(sd, CAMERAVDD, OFF);
vin_gpio_set_status(sd, PWDN, 0);
cci_unlock(sd);
break;
default:
return -EINVAL;
}
return 0;
}
3.2.2.5 检测函数
在开机加载驱动的时候,将会检测sensor ID,用于测试I2C 通讯是否正常和sensor 识别。
#define V4L2_IDENT_SENSOR 0x7750
sensor_read(sd, 0x300A, &rdval);
if (rdval != (V4L2_IDENT_SENSOR >> 8))
return -ENODEV;
sensor_read(sd, 0x300B, &rdval);
if (rdval != (V4L2_IDENT_SENSOR & 0xff))
return -ENODEV;

3.2.2.6 SENSOR 相关的IOCTL
用于应用层获取曝光增益,及进行与sensor 相关模块的驱动控制,如对焦,闪光等
case VIDIOC_VIN_SENSOR_EXP_GAIN:/*设置sensor的曝光增益*/
ret = sensor_s_exp_gain(sd, (struct sensor_exp_gain *)arg);
break;
case VIDIOC_VIN_SENSOR_CFG_REQ:/*获取sensor驱动的基础配置信息*/
sensor_cfg_req(sd, (struct sensor_config *)arg);
break;
case VIDIOC_VIN_ACT_SET_CODE:/*设置对焦马达配置参数,在配置AF模块时,需要此ioctl*/
actuator_set_code(sd, (struct actuator_ctrl *)arg);
3.2.2.7 与CSI 的接口
static struct sensor_format_struct sensor_formats[] = {};
RAW sensor:
.desc = "Raw RGB Bayer",
.mbus_code = MEDIA_BUS_FMT_SGRBG10_1X10,
.regs = sensor_fmt_raw,
.regs_size = ARRAY_SIZE(sensor_fmt_raw),
.bpp = 1
YUV sensor:
.desc = "YUYV 4:2:2",
.mbus_code = MEDIA_BUS_FMT_YUYV8_2X8,
.regs = sensor_fmt_yuyv422_yuyv,
.regs_size = ARRAY_SIZE(sensor_fmt_yuyv422_yuyv),
.bpp = 2
其中,mbus_code 中BGGR 可以根据sensor raw data 输出顺序修改为GBRG/RGGB/-GRBG。若填错, 会导致色彩偏紫红和出现网格状纹理。10_1X10 表示10 bit
并口输出, 若是12 bit MIPI 输出, 则改为12_12X1。其他情况类推。对于DVP YUV sensor, 需根据yuv 输出顺序选择yuyv/vyuy/uyvy/yvyu 其中一种。
static int sensor_g_mbus_config(struct v4l2_subdev *sd,struct v4l2_mbus_config *cfg)
DVP sensor:
cfg->type = V4L2_MBUS_PARALLEL;
cfg->flags = V4L2_MBUS_MASTER | VREF_POL | HREF_POL | CLK_POL;
MIPI sensor:
cfg->type = V4L2_MBUS_CSI2;
cfg->flags = 0 | V4L2_MBUS_CSI2_1_LANE | V4L2_MBUS_CSI2_CHANNEL_0;
其中,MIPI sensor 须根据实际使用的lane 数,修改V4L2_MBUS_CSI2_X_LANE 中的X值。如果使用LVDS 接口,需要将cfg->type 配置为V4L2_MBUS_SUBLVDS。
3.2.2.8 分辨率配置
static struct sensor_win_size sensor_win_sizes[] = {
{
.width = VGA_WIDTH,
.height = VGA_HEIGHT,
.hoffset = 0,
.voffset = 0,
.hts = 928,
.vts = 1720,
.pclk = 48 * 1000 * 1000,
.mipi_bps = 480 * 1000 * 1000,
.fps_fixed = 30,
.bin_factor = 1,
.intg_min = 1 << 4,
.intg_max = (1720) << 4,
.gain_min = 1 << 4,
.gain_max = 16 << 4,
.regs = sensor_VGA_regs,
.regs_size = ARRAY_SIZE(sensor_VGA_regs),
.set_size = NULL,
},
{
/* 定义图像输出的大小*/
.width = VGA_WIDTH,
.height = VGA_HEIGHT,
/* 定义输入ISP 的偏移量,用于截取所需的Size,丢弃不需要的部分图像*/
.hoffset = 0,
.voffset = 0,
/*
定义行长(以pclk 为单位)、帧长(以hts 为单位) 和像素时钟频率。hts 又称line_length_pck,vts 又称frame_length_lines,与寄存器的值要一致。pclk(pixel clock)的值由PLL 寄存器计算得出。
*/
.hts = 928,
.vts = 1720,
.pclk = 48 * 1000 * 1000,
/* 定义MIPI 数据速率,MIPI sensor 必需,其他sensor 忽略*/
/* mipi_bps = hts * vts * fps * raw bit / lane num */
.mipi_bps = 480 * 1000 * 1000,
/* 定义帧率,fps * hts * vts = pclk */
.fps_fixed = 30,
/*
定义曝光行数最小值和最大值,增益最小值和最大值,以16 为1 倍。最值的设置应在sensor 规格和
曝光函数限定的范围内,若超出会导致画面异常。此外,若AE table 中的最值超出这里的限制,会使得
AE table 失效。
*/
.intg_min = 1 << 4,
.intg_max = (1720) << 4,
.gain_min = 1 << 4,
.gain_max = 16 << 4,
/* (必需)说明这部分的配置对应哪个寄存器初始化代码*/
.regs = sensor_VGA_regs,
.regs_size = ARRAY_SIZE(sensor_VGA_regs),
},
};
根据应用的需求,在这里配置驱动能输出的不同尺寸帧率组合,注意,一种分辨率、帧率配置为一个数组成员,不要混淆。
3.2.3 LVDS 接口须知
除了完成以上函数的实现,LVDS Sensor 驱动还需要完成combo 同步校验函数和combo 数据线映射函数。combo 校验码可以在sensor 规格书获取,combo 数
据线映射关系需要查看原理图设计进行配对,可参考imx274_slvds.c 完成开发。
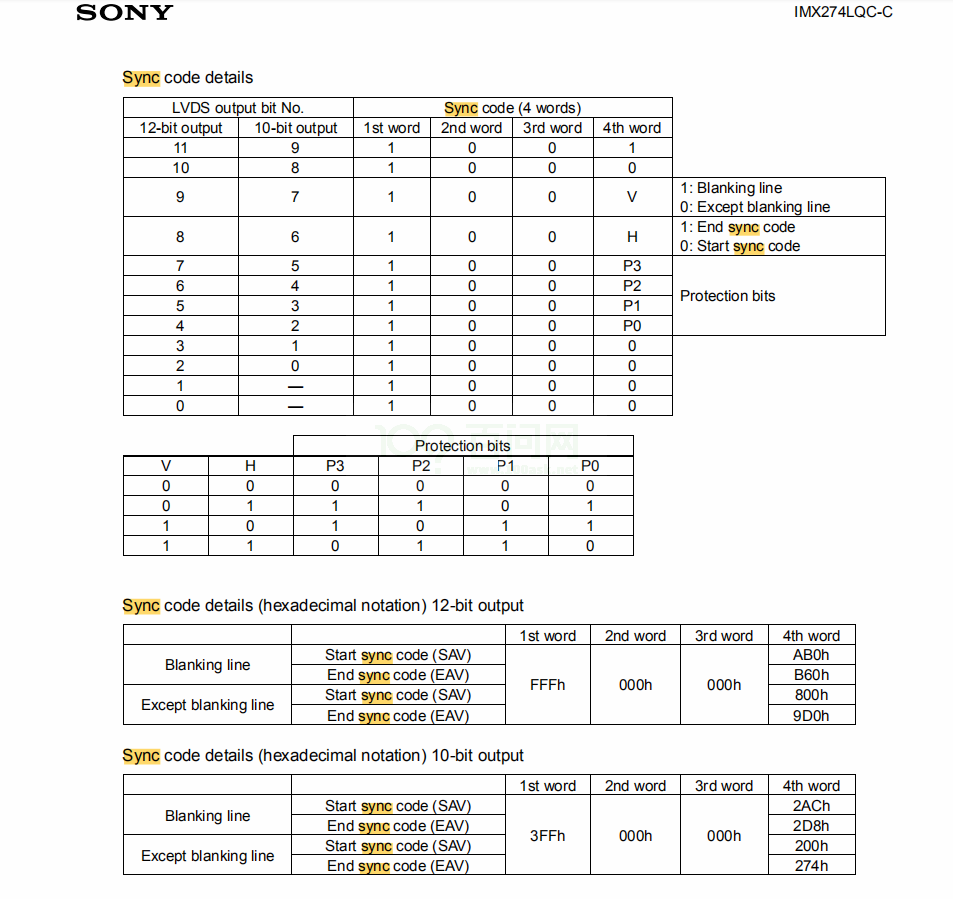
static void sensor_g_combo_sync_code(struct v4l2_subdev *sd,
struct combo_sync_code *sync)
{
int i;
for (i = 0; i < 12; i++) {
sync->lane_sof[i].low_bit = 0x0000ab00;
sync->lane_sof[i].high_bit = 0xFFFF0000;
sync->lane_sol[i].low_bit = 0x00008000;
sync->lane_sol[i].high_bit = 0xFFFF0000;
sync->lane_eol[i].low_bit = 0x00009d00;
sync->lane_eol[i].high_bit = 0xFFFF0000;
sync->lane_eof[i].low_bit = 0x0000b600;
sync->lane_eof[i].high_bit = 0xFFFF0000;
}
}
static void sensor_g_combo_lane_map(struct v4l2_subdev *sd,
struct combo_lane_map *map)
{
struct sensor_info *info = to_state(sd);
if (info->isp_wdr_mode == ISP_DOL_WDR_MODE) {
map->lvds_lane0 = LVDS_MAPPING_A_D0_TO_LANE0;
map->lvds_lane1 = LVDS_MAPPING_A_D1_TO_LANE1;
map->lvds_lane2 = LVDS_MAPPING_B_D2_TO_LANE2;
map->lvds_lane3 = LVDS_MAPPING_B_D0_TO_LANE3;
map->lvds_lane4 = LVDS_MAPPING_B_D3_TO_LANE4;
map->lvds_lane5 = LVDS_MAPPING_C_D2_TO_LANE5;
map->lvds_lane6 = LVDS_LANE6_NO_USE;
map->lvds_lane7 = LVDS_LANE7_NO_USE;
map->lvds_lane8 = LVDS_LANE8_NO_USE;
map->lvds_lane9 = LVDS_LANE9_NO_USE;
map->lvds_lane10 = LVDS_LANE10_NO_USE;
map->lvds_lane11 = LVDS_LANE11_NO_USE;
} else {
map->lvds_lane0 = LVDS_MAPPING_A_D1_TO_LANE0;
map->lvds_lane1 = LVDS_MAPPING_B_D2_TO_LANE1;
map->lvds_lane2 = LVDS_MAPPING_B_D0_TO_LANE2;
map->lvds_lane3 = LVDS_MAPPING_B_D3_TO_LANE3;
map->lvds_lane4 = LVDS_LANE4_NO_USE;
map->lvds_lane5 = LVDS_LANE5_NO_USE;
map->lvds_lane6 = LVDS_LANE6_NO_USE;
map->lvds_lane7 = LVDS_LANE7_NO_USE;
map->lvds_lane8 = LVDS_LANE8_NO_USE;
map->lvds_lane9 = LVDS_LANE9_NO_USE;
map->lvds_lane10 = LVDS_LANE10_NO_USE;
map->lvds_lane11 = LVDS_LANE11_NO_USE;
}
}
3.2.4 内核代码注意事项
驱动中一般禁止使用mdelay 或者msleep 实现延时,例如使用msleep 实现10~20ms的延时,通常会因为系统调度而变成延时更长的时间,这种做法精度较差。
所以如果需要使用ms 级别延时,则使用usleep_range(a, b),比如原来mdelay(1)、mdelay(10) 可改为usleep_range(1000, 2000)、usleep_range(10000,
12000)。如果是长达30ms 或以上的延时可选择使用msleep();
中断过程中不能使用msleep 和usleep_range,除了特殊情况必须加延时之外,mdelay 一般也不可使用。