模块配置
4 模块配置
4.1 Tina 配置
Tina 中主要是修改平台的modules.mk 配置,modules.mk 主要完成两个方面:
1.拷贝相关的ko 模块到小机rootfs 中
2.rootfs 启动时,按顺序自动加载相关的ko 模块。
由于内核框架的不一样,需要区分vfe 和vin 进行相应的配置。
4.1.1 vfe 框架
modules.mk 配置路径(以R40 平台的为例):
其中的r40-common 为R40 平台共有的配置文件目录,相应的修改对应平台的modules.mk即可。
define KernelPackage/sunxi-vfe
SUBMENU:=$(VIDEO_MENU)
TITLE:=sunxi-vfe support
FILES:=$(LINUX_DIR)/drivers/media/v4l2-core/videobuf2-core.ko
FILES+=$(LINUX_DIR)/drivers/media/v4l2-core/videobuf2-memops.ko
FILES+=$(LINUX_DIR)/drivers/media/v4l2-core/videobuf2-dma-contig.ko
FILES+=$(LINUX_DIR)/drivers/media/v4l2-core/videobuf2-v4l2.ko
FILES+=$(LINUX_DIR)/drivers/media/platform/sunxi-vfe/vfe_io.ko
FILES+=$(LINUX_DIR)/drivers/media/platform/sunxi-vfe/device/ov5640.ko (详见1)
FILES+=$(LINUX_DIR)/drivers/media/platform/sunxi-vfe/vfe_v4l2.ko
AUTOLOAD:=$(call AutoLoad,90,videobuf2-core videobuf2-memops videobuf2-dma-contig
videobuf2-v4l2 vfe_io ov5640 vfe_v4l2) (详见2)
endef
define KernelPackage/sunxi-vfe/description
Kernel modules for sunxi-vfe support
endef
详注:
1.由具体使用的模组确定,需要确定内核路径中这个驱动是否被编译出来。
2.AUTOLOAD为小机rootfs挂载后自动加载的机制,vfe_v4l2.ko必须在最后加载,其它ko可以按照上面的相对顺序加载。必须修改相应的sensor ko才会开启自加载。
4.1.2 vin 框架
modules.mk 配置路径(以R30 平台的为例):
其中的r30-common 为R30 平台共有的配置文件目录,相应的修改对应平台的modules.mk即可。
define KernelPackage/sunxi-vin
SUBMENU:=$(VIDEO_MENU)
TITLE:=sunxi-vin support
FILES:=$(LINUX_DIR)/drivers/media/v4l2-core/videobuf2-core.ko
FILES+=$(LINUX_DIR)/drivers/media/v4l2-core/videobuf2-memops.ko
FILES+=$(LINUX_DIR)/drivers/media/v4l2-core/videobuf2-dma-contig.ko
FILES+=$(LINUX_DIR)/drivers/media/v4l2-core/videobuf2-v4l2.ko
FILES+=$(LINUX_DIR)/drivers/media/platform/sunxi-vin/vin_io.ko
/*对焦马达驱动加载*/
FILES+=$(LINUX_DIR)/drivers/media/platform/sunxi-vin/modules/actuator/actuator.ko
FILES+=$(LINUX_DIR)/drivers/media/platform/sunxi-vin/modules/actuator/dw9714_act.ko(详见
3)
FILES+=$(LINUX_DIR)/drivers/media/platform/sunxi-vin/modules/sensor/ov5640.ko (详见1)
FILES+=$(LINUX_DIR)/drivers/media/platform/sunxi-vin/vin_v4l2.ko
AUTOLOAD:=$(call AutoLoad,90,videobuf2-core videobuf2-memops videobuf2-dma-contig
videobuf2-v4l2 vin_io actuator dw9714_act ov5640 vin_v4l2) (详见2)
endef
define KernelPackage/sunxi-vin/description
Kernel modules for sunxi-vin support
endef
详注:
1.由具体使用的模组确定,需要确定内核路径中这个驱动是否被编译出来。
2.AUTOLOAD为小机rootfs挂载后自动加载的机制,vin_v4l2.ko必须在最后加载,其它ko可以按照上面的相对顺序加载。
3.对焦马达驱动加载顺序必须在sensor驱动加载之前,具体驱动型号根据模组规格书进行确认。
V 系列平台在完成modules.mk 配置后,还需要完成.ko 挂载脚本S00mpp 的配置,S00mpp
配置路径(以V853 平台为例):
其中的v853-perf1 为V 系列平台共有的配置文件目录,相应的修改对应平台的S00mpp 即可。
#!/bin/sh
#
# Load mpp modules....
#
MODULES_DIR="/lib/modules/`uname -r`"
start() {
printf "Load mpp modules\n"
insmod $MODULES_DIR/videobuf2-core.ko
insmod $MODULES_DIR/videobuf2-memops.ko
insmod $MODULES_DIR/videobuf2-dma-contig.ko
insmod $MODULES_DIR/videobuf2-v4l2.ko
insmod $MODULES_DIR/vin_io.ko
# insmod $MODULES_DIR/sensor_power.ko
insmod $MODULES_DIR/gc4663_mipi.ko
insmod $MODULES_DIR/vin_v4l2.ko
insmod $MODULES_DIR/sunxi_aio.ko
insmod $MODULES_DIR/sunxi_eise.ko
# insmod $MODULES_DIR/vipcore.ko
}
stop() {
printf "Unload mpp modules\n"
# rmmod $MODULES_DIR/vipcore.ko
rmmod $MODULES_DIR/sunxi_eise.ko
rmmod $MODULES_DIR/sunxi_aio.ko
rmmod $MODULES_DIR/vin_v4l2.ko
rmmod $MODULES_DIR/gc4663_mipi.ko
# rmmod $MODULES_DIR/sensor_power.ko
rmmod $MODULES_DIR/vin_io.ko
rmmod $MODULES_DIR/videobuf2-v4l2.ko
rmmod $MODULES_DIR/videobuf2-dma-contig.ko
rmmod $MODULES_DIR/videobuf2-memops.ko
rmmod $MODULES_DIR/videobuf2-core.ko
}
case "$1" in
start)
start
;;
stop)
stop
;;
restart|reload)
stop
start
;;
*)
echo "Usage: $0 {start|stop|restart}"
exit 1
esac
exit $?
4.2 CSI 板级配置
Tina 平台根据不同的平台差异分别使用sys_config.fex 或board.dst 配置camera CSI,具体的对应关系如下表,下面将分别介绍sys_config.fex 和board.dts 中关
于camera CSI 配置。
| 平台 | CSI 使用的配置方式 |
|---|---|
| F35 | sys_config.fex |
| R16 | sys_config.fex |
| R18 | sys_config.fex |
| R30 | sys_config.fex |
| R40 | sys_config.fex |
| R311 | sys_config.fex |
| MR133 | sys_config.fex |
| R818 | board.dts |
| MR813 | board.dts |
| R528 | board.dts |
| V536 | sys_config.fex |
| V533 | board.dts |
| V831 | board.dts |
| V833 | board.dts |
| V851 | board.dts |
| V853 | board.dts |
4.2.1 sys_config.fex 平台配置
sys_config.fex 配置camera CSI,CSI sys_config.fex 部分对应的字段为:[csi0]。通过举例R40 平台说明在实际使用中应该如何配置:假如使用一个并口camera
模组需要配置[csi0] 的公用部分和[csi0] 的vip_dev0_(x) 部分,另外[csi0] 中vip_used 设置为1,[csi1]中vip_used 设置为0。
下面给出一个ov5640 模组的参考配置:其中[csi0] 为并口的配置。具体填写方法请参照以下说明:
/* 下面部分的CSI配置适用4.9内核之前的平台*/
;--------------------------------------------------------------------------------
;csi (COMS Sensor Interface) configuration
;csi(x)_dev(x)_used: 0:disable 1:enable
;csi(x)_dev(x)_isp_used 0:not use isp 1:use isp
;csi(x)_dev(x)_fmt: 0:yuv 1:bayer raw rgb
;csi(x)_dev(x)_stby_mode: 0:not shut down power at standby 1:shut down power at standby
;csi(x)_dev(x)_vflip: flip in vertical direction 0:disable 1:enable
;csi(x)_dev(x)_hflip: flip in horizontal direction 0:disable 1:enable
;csi(x)_dev(x)_iovdd: camera module io power handle string, pmu power supply
;csi(x)_dev(x)_iovdd_vol: camera module io power voltage, pmu power supply
;csi(x)_dev(x)_avdd: camera module analog power handle string, pmu power supply
;csi(x)_dev(x)_avdd_vol: camera module analog power voltage, pmu power supply
;csi(x)_dev(x)_dvdd: camera module core power handle string, pmu power supply
;csi(x)_dev(x)_dvdd_vol: camera module core power voltage, pmu power supply
;csi(x)_dev(x)_afvdd: camera module vcm power handle string, pmu power supply
;csi(x)_dev(x)_afvdd_vol: camera module vcm power voltage, pmu power supply
;fill voltage in uV, e.g. iovdd = 2.8V, csix_iovdd_vol = 2800000
;fill handle string as below:
;axp22_eldo3
;axp22_dldo4
;axp22_eldo2
;fill handle string "" when not using any pmu power supply
;--------------------------------------------------------------------------------
[csi0]
csi0_used = 1
csi0_sensor_list = 0
csi0_pck = port:PE00<2><default><default><default>
csi0_mck = port:PE01<2><default><default><default>
csi0_hsync = port:PE02<2><default><default><default>
csi0_vsync = port:PE03<2><default><default><default>
csi0_d0 = port:PE04<2><default><default><default>
csi0_d1 = port:PE05<2><default><default><default>
csi0_d2 = port:PE06<2><default><default><default>
csi0_d3 = port:PE07<2><default><default><default>
csi0_d4 = port:PE08<2><default><default><default>
csi0_d5 = port:PE09<2><default><default><default>
csi0_d6 = port:PE10<2><default><default><default>
csi0_d7 = port:PE11<2><default><default><default>
csi0_sck = port:PE12<2><default><default><default>
csi0_sda = port:PE13<2><default><default><default>
[csi0/csi0_dev0]
csi0_dev0_used = 1
csi0_dev0_mname = "ov5640" ;必须和sensor驱动中的SENSOR_NAME一致
csi0_dev0_twi_addr = 0x78 ;请参考实际模组的8bit ID填写
csi0_dev0_twi_id = 2
csi0_dev0_pos = "rear"
csi0_dev0_isp_used = 0 ;YUV格式填0,RAW格式填1
csi0_dev0_fmt = 0 ;YUV格式填0,RAW格式填1
csi0_dev0_stby_mode = 0
csi0_dev0_vflip = 0
csi0_dev0_hflip = 0
csi0_dev0_iovdd = "csi-iovcc" ;电源请参考实际原理图填写,同时参考
sys_config.fex 的regulator 配置,确认该字段有效
csi0_dev0_iovdd_vol = 2800000 ;电压值参考datasheet
csi0_dev0_avdd = "csi-avdd" ;电源请参考实际原理图填写,同时参考
sys_config.fex 的regulator 配置,确认该字段有效
csi0_dev0_avdd_vol = 2800000 ;电压值参考datasheet
csi0_dev0_dvdd = "csi-dvdd" ;电源请参考实际原理图填写,同时参考
sys_config.fex 的regulator 配置,确认该字段有效
csi0_dev0_dvdd_vol = 1500000 ;电压值参考datasheet
csi0_dev0_afvdd = "csi-afvcc" ;电源请参考实际原理图填写,同时参考
sys_config.fex 的regulator 配置,确认该字段有效
csi0_dev0_afvdd_vol = 2800000 ;电压值参考datasheet
csi0_dev0_power_en =
csi0_dev0_reset = port:PE14<1><0><1><0> ;io选取参照实际原理图
csi0_dev0_pwdn = port:PE15<1><0><1><0> ;io选取参照实际原理图
csi0_dev0_flash_used = 0
csi0_dev0_flash_type = 2
csi0_dev0_flash_en =
csi0_dev0_flash_mode =
csi0_dev0_flvdd = ""
csi0_dev0_flvdd_vol =
csi0_dev0_af_pwdn =
csi0_dev0_act_used = 0
csi0_dev0_act_name = "ad5820_act"
csi0_dev0_act_slave = 0x18
/* 下面部分的CSI配置适用4.9内核平台*/
;--------------------------------------------------------------------------------
;csi (COMS Sensor Interface) configuration
;csi(x)_dev(x)_used: 0:disable 1:enable
;csi(x)_dev(x)_isp_used 0:not use isp 1:use isp
;csi(x)_dev(x)_fmt: 0:yuv 1:bayer raw rgb
;csi(x)_dev(x)_stby_mode: 0:not shut down power at standby 1:shut down power at standby
;csi(x)_dev(x)_vflip: flip in vertical direction 0:disable 1:enable
;csi(x)_dev(x)_hflip: flip in horizontal direction 0:disable 1:enable
;csi(x)_dev(x)_iovdd: camera module io power handle string, pmu power supply
;csi(x)_dev(x)_iovdd_vol: camera module io power voltage, pmu power supply
;csi(x)_dev(x)_avdd: camera module analog power handle string, pmu power supply
;csi(x)_dev(x)_avdd_vol: camera module analog power voltage, pmu power supply
;csi(x)_dev(x)_dvdd: camera module core power handle string, pmu power supply
;csi(x)_dev(x)_dvdd_vol: camera module core power voltage, pmu power supply
;csi(x)_dev(x)_afvdd: camera module vcm power handle string, pmu power supply
;csi(x)_dev(x)_afvdd_vol: camera module vcm power voltage, pmu power supply
;fill voltage in uV, e.g. iovdd = 2.8V, csix_iovdd_vol = 2800000
;fill handle string as below:
;axp22_eldo3
;axp22_dldo4
;axp22_eldo2
;fill handle string "" when not using any pmu power supply
;--------------------------------------------------------------------------------
[vind0]
vind0_used = 1
[vind0/csi_cci0]
csi_cci0_used = 1 ;配置是否使用CCI,如果使用CCI,需要使能该配置并配置下面的CCI引脚
csi_cci0_sck = port:PE01<2><default><default><default>
csi_cci0_sda = port:PE02<2><default><default><default>
[vind0/flash0]
flash0_used = 0
flash0_type = 2
flash0_en =
flash0_mode =
flash0_flvdd = ""
flash0_flvdd_vol =
[vind0/actuator0]
actuator0_used = 0
actuator0_name = "ad5820_act"
actuator0_slave = 0x18
actuator0_af_pwdn =
actuator0_afvdd = "afvcc-csi"
actuator0_afvdd_vol = 2800000
[vind0/sensor0]
sensor0_used = 0
sensor0_mname = "gc8034_mipi"
sensor0_twi_cci_id = 0
sensor0_twi_addr = 0x6e
sensor0_pos = "rear"
sensor0_isp_used = 1
sensor0_fmt = 1
sensor0_stby_mode = 0
sensor0_vflip = 0
sensor0_hflip = 0
sensor0_cameravdd = ""
sensor0_cameravdd_vol = 3300000
sensor0_iovdd = "iovdd-csi"
sensor0_iovdd_vol = 1800000
sensor0_avdd = "avdd-csi-f"
sensor0_avdd_vol = 2800000
sensor0_dvdd = "dvdd-csi"
sensor0_dvdd_vol = 1200000
sensor0_power_en =
sensor0_reset = port:PE06<0><0><1><0>
sensor0_pwdn = port:PE05<0><0><1><0>
[vind0/sensor1]
sensor1_used = 1
sensor1_mname = "gc8034_mipi" ;必须要和驱动的SENSOR_NAME 一致
sensor1_twi_cci_id = 0 ;配置使用的TWI id,如果使用TWI,则不使用CCI
sensor1_twi_addr = 0x6e ;配置sensor的i2c地址
sensor1_pos = "front"
sensor1_isp_used = 1 ;配置是否使用isp
sensor1_fmt = 1
sensor1_stby_mode = 0
sensor1_vflip = 0
sensor1_hflip = 0
sensor1_cameravdd = ""
sensor1_cameravdd_vol = 3300000
sensor1_iovdd = "iovdd-csi"
sensor1_iovdd_vol = 1800000
sensor1_avdd = "avdd-csi-f"
sensor1_avdd_vol = 2800000
sensor1_dvdd = "dvdd-csi"
sensor1_dvdd_vol = 1200000
sensor1_power_en =
sensor1_reset = port:PE06<0><0><1><0>
sensor1_pwdn = port:PE05<0><0><1><0>
[vind0/vinc0] ;配置video0 的数据链路
vinc0_used = 1
vinc0_csi_sel = 0
vinc0_mipi_sel = 0
vinc0_isp_sel = 0
vinc0_rear_sensor_sel = 1 ;配置使用sensor1 输出图像数据到video0
vinc0_front_sensor_sel = 1 ;配置使用sensor1 输出图像数据到video0
vinc0_sensor_list = 0
[vind0/vinc1]
vinc1_used = 0
vinc1_csi_sel = 0
vinc1_mipi_sel = 0
vinc1_isp_sel = 0
vinc1_rear_sensor_sel = 1
vinc1_front_sensor_sel = 1
vinc1_sensor_list = 0
关于电源的配置,根据板子的原理图,了解需要sensor 驱动配置哪几路电,然后在sys_config.fex中进行配置:比如说sensor0 有个“CSI-IOVCC” 连接到AXP
的“LDO4”,那么,在sys_config.fex 中搜索LDO4 ,然后在其后面增加“csi-iovcc” ,这样,在sensor 端就可以使用该标号配置sensor0_iovdd。
同时关于mr133/R311 平台,sys_config.fex 中的vinc0_rear_sensor_sel 和vinc0_front_sensor_sel
配置决定着使用哪路sensor 输入数据,该配置与硬件连接相关,可参考本文档最后的其他注意事项章节。
4.2.2 board.dts 平台配置
当前MR813/R818/R528 平台的摄像头配置不再使用sys_config.fex 而使用board.dts,文件存放在tina/device/config/chips/mr813(R818、R528)/configs/
< 方案> 目录下,摄像头相关的配置如下:
vind0:vind@0 {
vind0_clk = <336000000>;
vind0_isp = <327000000>;
status = "okay";
actuator0:actuator@0 {
device_type = "actuator0";
actuator0_name = "ad5820_act";/*必须要和驱动的SUNXI_ACT_NAME一致*/
actuator0_slave = <0x18>;/*必须和驱动的SUNXI_ACT_ID一致*/
actuator0_af_pwdn = <>;
actuator0_afvdd = "afvcc-csi";
actuator0_afvdd_vol = <2800000>;/*af模块的配电不在此处,在sensor配置中*/
status = "disabled";/*使能开关,当使用AF功能时,status = "okay"*/
};
flash0:flash@0 {
device_type = "flash0";
flash0_type = <2>;
flash0_en = <>;
flash0_mode = <>;
flash0_flvdd = "";
flash0_flvdd_vol = <>;
device_id = <0>;
status = "disabled";
};
sensor0:sensor@0 {
device_type = "sensor0";
sensor0_mname = "imx278_mipi"; /* 必须要和驱动的 SENSOR_NAME 一致 */
sensor0_twi_cci_id = <2>;
sensor0_twi_addr = <0x20>;
sensor0_mclk_id = <0>;
sensor0_pos = "rear";
sensor0_isp_used = <1>; /* R528 没有isp,该项需要配置为0 */
sensor0_fmt = <1>;
sensor0_stby_mode = <0>;
sensor0_vflip = <0>;
sensor0_hflip = <0>;
/* sensor iovdd 连接的 ldo,根据硬件原理图的连接,
* 确认是连接到 axp 哪个 ldo,假设 iovdd 连接到 aldo3,
* 则 sensor0_iovdd-supply = <®_aldo3>,其他同理。
*/
sensor0_iovdd-supply = <®_dldo2>;
sensor0_iovdd_vol = <1800000>;
sensor0_avdd-supply = <®_dldo3>;
sensor0_avdd_vol = <2800000>;
sensor0_dvdd-supply = <®_eldo2>;
sensor0_afvdd-supply = <®_aldo3>;/*根据硬件原理图,确定配的哪路电*/
sensor0_afvdd_vol = <2800000>;/*根据硬件原理图,确认工作电压*/
sensor0_dvdd_vol = <1200000>;
sensor0_power_en = <>;
/* 根据板子实际连接,修改 reset、pwdn 的引脚即可 */
/* GPIO 信息配置:pio 端口 组内序号 功能分配 内部电阻状态 驱动能力 输出电平状态 */
sensor0_reset = <&pio PE 9 1 0 1 0>;
sensor0_pwdn = <&pio PE 8 1 0 1 0>;
status = "okay";
};
sensor1:sensor@1 {
device_type = "sensor1";
sensor1_mname = "imx386_mipi";
sensor1_twi_cci_id = <3>;
sensor1_twi_addr = <0x20>;
sensor1_mclk_id = <1>;
sensor1_pos = "front";
sensor1_isp_used = <1>;
sensor1_fmt = <1>;
sensor1_stby_mode = <0>;
sensor1_vflip = <0>;
sensor1_hflip = <0>;
sensor1_iovdd-supply = <®_dldo2>;
sensor1_iovdd_vol = <1800000>;
sensor1_avdd-supply = <®_dldo3>;
sensor1_avdd_vol = <2800000>;
sensor1_dvdd-supply = <®_eldo2>;
sensor1_dvdd_vol = <1200000>;
sensor0_power_en = <>;
sensor1_reset = <&pio PE 7 1 0 1 0>;
sensor1_pwdn = <&pio PE 6 1 0 1 0>;
status = "okay";
};
/* 一个 vinc 代表一个 /dev/video 设备 */
vinc0:vinc@0 {
vinc0_csi_sel = <0>; /* 代表选择的 csi,MR813/R818 有两个 csi 接口
*/
vinc0_mipi_sel = <0>; /* 代表选择的 mipi 接口,MR813/R818 有两个 mipi
接口 */
vinc0_isp_sel = <0>;
vinc0_isp_tx_ch = <0>; /* 表示 ISP 的通道数,一般配置为 0 */
vinc0_tdm_rx_sel = <0>; /* 与 isp_sel 保持一致即可 */
vinc0_rear_sensor_sel = <0>; /* 该 video 可以选择从哪个 sensor 输入图像数据
*/
vinc0_front_sensor_sel = <1>;
vinc0_sensor_list = <0>;
status = "okay";
};
vinc1:vinc@1 {
vinc1_csi_sel = <0>;
vinc1_mipi_sel = <0>; /* R528没有mipi,该项配置为0xff */
vinc1_isp_sel = <0>; /* R528没有isp,该项配置为0 */
vinc1_isp_tx_ch = <0>; /* R528没有isp,该项配置为0 */
vinc1_tdm_rx_sel = <0>; /* R528没有isp,该项配置为0xff */
vinc1_rear_sensor_sel = <0>;
vinc1_front_sensor_sel = <1>;
vinc1_sensor_list = <0>;
status = "okay";
};
vinc2:vinc@2 {
vinc2_csi_sel = <1>;
vinc2_mipi_sel = <1>;
vinc2_isp_sel = <1>;
vinc2_isp_tx_ch = <0>;
vinc2_tdm_rx_sel = <1>;
vinc2_rear_sensor_sel = <1>;
vinc2_front_sensor_sel = <1>;
vinc2_sensor_list = <0>;
status = "okay";
};
vinc3:vinc@3 {
vinc3_csi_sel = <1>;
vinc3_mipi_sel = <1>;
vinc3_isp_sel = <1>;
vinc3_isp_tx_ch = <0>;
vinc3_tdm_rx_sel = <1>;
vinc3_rear_sensor_sel = <1>;
vinc3_front_sensor_sel = <1>;
vinc3_sensor_list = <0>;
status = "okay";
};
};
/* 以下将配置两路 sensor 输入,产生 4 个 video 节点,内核配置 CONFIG_SUPPORT_ISP_TDM=n,此时
* 不同 sensor 输出的节点不能同时使用,比如以下配置的 video0 不可以和 video2 video3 同时使用
*/
vinc0:vinc@0 {
vinc0_csi_sel = <0>;
vinc0_mipi_sel = <0>;
vinc0_isp_sel = <0>;
vinc0_isp_tx_ch = <0>;
vinc0_tdm_rx_sel = <0>;
vinc0_rear_sensor_sel = <0>;
vinc0_front_sensor_sel = <0>;
vinc0_sensor_list = <0>;
status = "okay";
};
vinc1:vinc@1 {
vinc1_csi_sel = <0>;
vinc1_mipi_sel = <0>;
vinc1_isp_sel = <0>;
vinc1_isp_tx_ch = <0>;
vinc1_tdm_rx_sel = <0>;
vinc1_rear_sensor_sel = <0>;
vinc1_front_sensor_sel = <1>;
vinc1_sensor_list = <0>;
status = "okay";
};
vinc2:vinc@2 {
vinc2_csi_sel = <1>;
vinc2_mipi_sel = <1>;
vinc2_isp_sel = <0>;
vinc2_isp_tx_ch = <0>;
vinc2_tdm_rx_sel = <0>;
vinc2_rear_sensor_sel = <1>;
vinc2_front_sensor_sel = <1>;
vinc2_sensor_list = <0>;
status = "okay";
};
vinc3:vinc@3 {
vinc3_csi_sel = <1>;
vinc3_mipi_sel = <1>;
vinc3_isp_sel = <0>;
vinc3_isp_tx_ch = <0>;
vinc3_tdm_rx_sel = <0>;
vinc3_rear_sensor_sel = <1>;
vinc3_front_sensor_sel = <1>;
vinc3_sensor_list = <0>;
status = "okay";
};
/* 以下配置将可以从两路 sensor 同时输入,内核配置 CONFIG_SUPPORT_ISP_TDM=y,但是有个限制,
* 只能先运行 video0,然后才可以运行 video2,关闭的时候也是如此,先关 video2,再关 video0
*/
vinc0:vinc@0 {
vinc0_csi_sel = <0>;
vinc0_mipi_sel = <0>;
vinc0_isp_sel = <0>;
vinc0_isp_tx_ch = <0>;
vinc0_tdm_rx_sel = <0>;
vinc0_rear_sensor_sel = <0>;
vinc0_front_sensor_sel = <0>;
vinc0_sensor_list = <0>;
status = "okay";
};
vinc1:vinc@1 {
vinc1_csi_sel = <0>;
vinc1_mipi_sel = <0>;
vinc1_isp_sel = <0>;
vinc1_isp_tx_ch = <0>;
vinc1_tdm_rx_sel = <0>;
vinc1_rear_sensor_sel = <0>;
vinc1_front_sensor_sel = <1>;
vinc1_sensor_list = <0>;
status = "okay";
};
vinc2:vinc@2 {
vinc2_csi_sel = <1>;
vinc2_mipi_sel = <1>;
vinc2_isp_sel = <1>;
vinc2_isp_tx_ch = <0>;
vinc2_tdm_rx_sel = <1>;
vinc2_rear_sensor_sel = <1>;
vinc2_front_sensor_sel = <1>;
vinc2_sensor_list = <0>;
status = "okay";
};
vinc3:vinc@3 {
vinc3_csi_sel = <1>;
vinc3_mipi_sel = <1>;
vinc3_isp_sel = <1>;
vinc3_isp_tx_ch = <0>;
vinc3_tdm_rx_sel = <1>;
vinc3_rear_sensor_sel = <1>;
vinc3_front_sensor_sel = <1>;
vinc3_sensor_list = <0>;
status = "okay";
};
修改该文件之后,需要重新编译固件再打包,才会更新到dts。同时,如果需要使用双摄,双摄分别使用到两个ISP,那么内核需要选上SUPPORT_ISP_TDM 配置。
4.3 menuconfig 配置说明
在命令行进入Tina 根目录,执行命令进入配置主界面:
source build/envsetup.sh (详见1)
lunch 方案编号(详见2)
make menuconfig (详见3)
详注:
1.加载环境变量及tina提供的命令;
2.输入编号,选择方案;
3.进入配置主界面(对一个shell而言,前两个命令只需要执行一次)
make menuconfig 配置路径:
Kernel modules
└─>Video Support
└─>kmod-sunxi-vfe(vfe框架的csi camera) (详见1)
└─>kmod-sunxi-vin(vin框架的csi camera) (详见2)
└─>kmod-sunxi-uvc(uvc camera) (详见3)
详注:
1.平台使用vfe框架的csi camera选择该驱动;
2.平台使用vin框架的csi camera选择该驱动;(该项与vfe框架,在同一个平台只会出现其中一个)
3.usb camera选择该驱动;
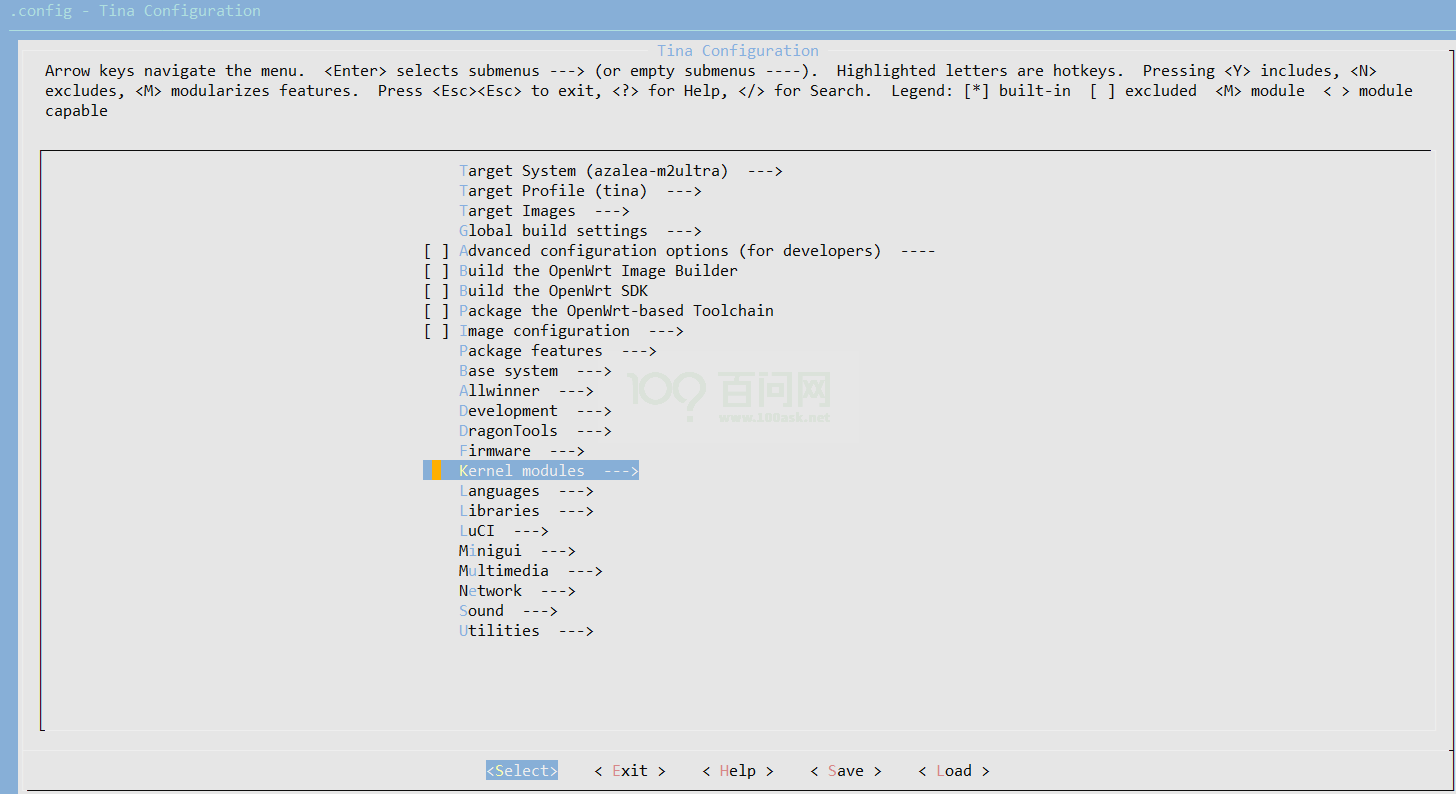
在完成sensor 驱动编写,modules.mk 和板级配置后,通过make menuconfig 选上相应的驱动,camera 即可正常使用。下面以R40 平台介绍。首先,选择
Kernel modules 选项进入下一级配置,如下图所示:
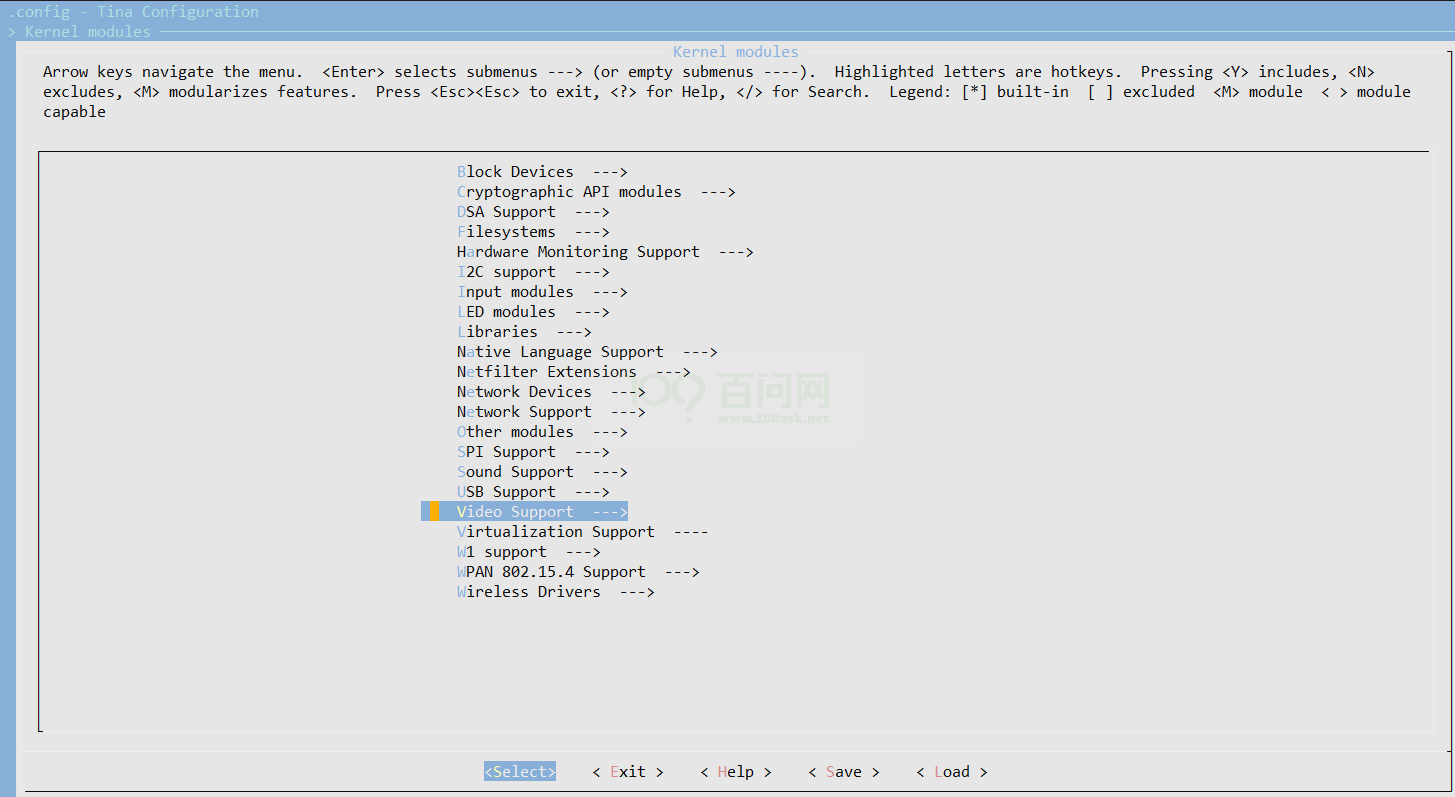
然后,选择Video Support 选项,进入下一级配置,如下图所示:
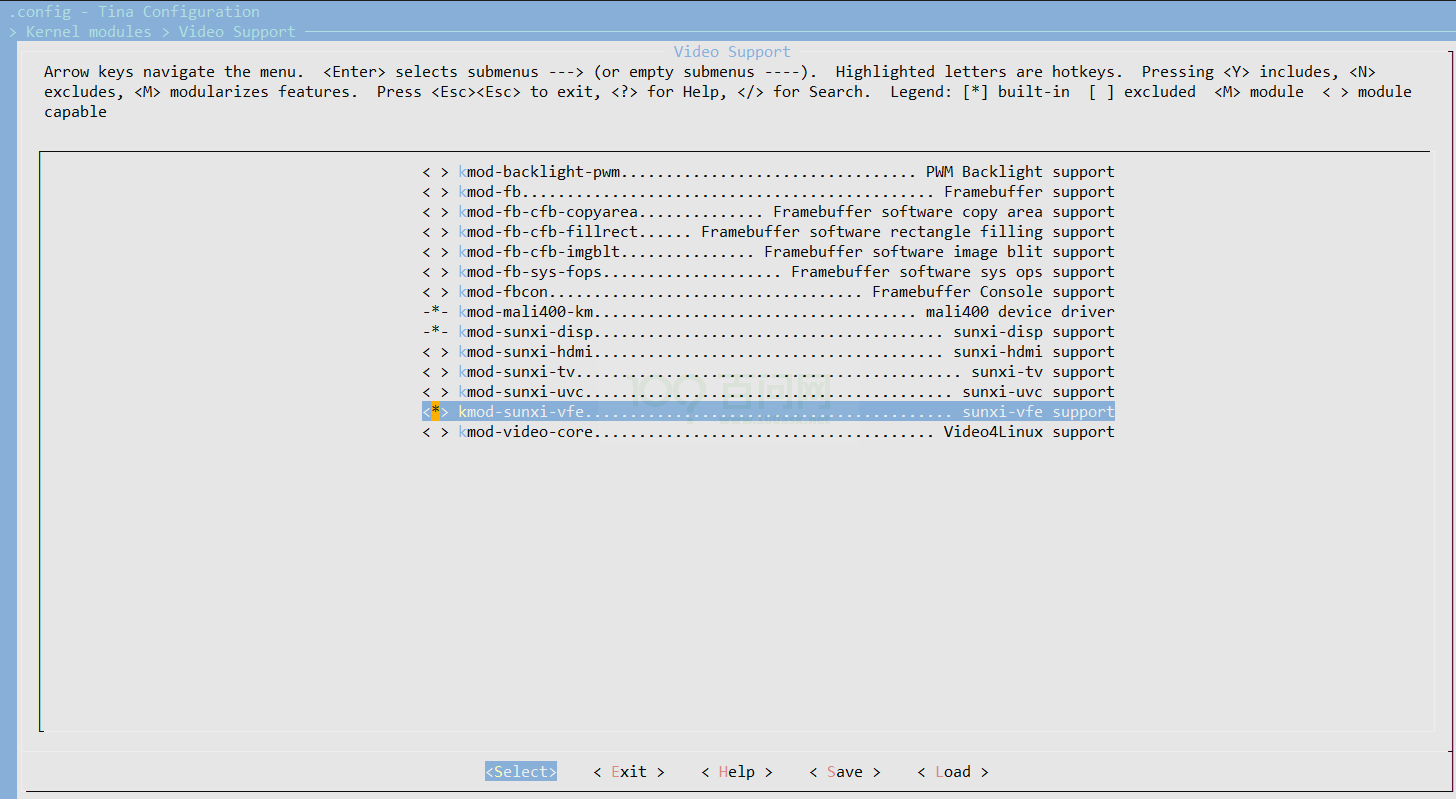
最后,选择kmod-sunxi-vfe 选项,可选择<*> 表示编译包含到固件,也可以选择表示仅编译不包含在固件。如下图所示:
4.4 如何增加ISP 效果配置
在完成ISP 调试之后,将会从ISP 调试工程师中得到相应的头文件配置,添加操作如下:
4.4.1 VFE 框架
-
将头文件添加到驱动的sunxi-vfe/isp_cfg/SENSOR_H 目录下;
-
在驱动sunxi-vfe/isp_cfg 目录下,有个isp_cfg.c 文件,这文件中有个isp_cfg_array 数组,在sensor 的ISP 配置文件最下面也有个相应的结构体,在
isp_cfg_array 数组中按照数组的结构,增加sensor 的name 和结构体即可,这样将会在ISP 匹配的时候,将会根据name 匹配到相应的配置;
4.4.2 VIN 框架
4.4.2.1 R 系列
- vin 框架的操作也是类似的,只是更换了位置。vin 的ISP 配置在tina/package/allwinner/libAWIspApi 目录下,其中R311、MR133 在src/isp520,而R818、
MR813 在src/isp522。在libisp/isp_cfg/SENSOR 目录下增加相应的头文件,然后在上一层目录的isp_ini_parse.c 文件增加头文件以及修改相应的isp_cfg_array cfg_arr 数组匹配即可。
- VIN 使用ISP,需要在camerademo 中make menuconfig 的时候,选择上Choosewhether to use VIN ISP (YES)。同时VIN 的需要注意,当自己开发camera
HAL 层时,需要自己运行camera ISP service,具体实现可参考camerademo 的实现。添加正确时,在运行camerademo 将会输出相应的sensor 配置信息,
比如:
上述表示正确查找到imx278_mipi 这个sensor 2048*1152 60fps 的ISP 配置,其他的sensorISP 配置移植正确也将会有类似的打印,输出信息分别是sensor name 、分辨率、帧率,确认这些信息一致即可。
4.4.2.2 V 系列
- V 系列ISP 库目录,V533、V83x 平台位于:softwinner/eyesee-mpp/middleware/sun8iw19p1/media/V536 平台位于:softwinner/eyesee-
mpp/middleware/v316/media/LIBRARY/libisp/,V85x 平台位于:external/eyesee-mpp/middleware/sun8iw21/media/LIBRARY/libisp/
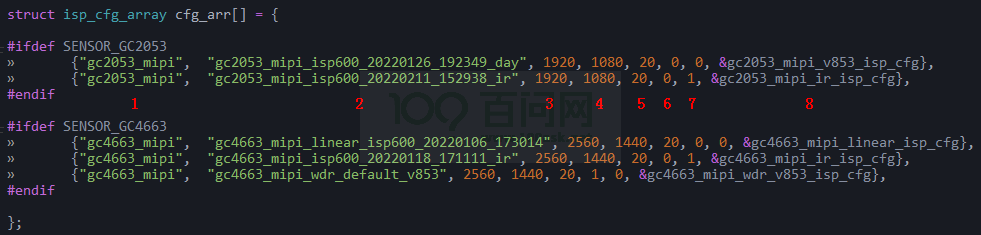
- 修改libisp/isp_cfg/isp_ini_parse.c,将ISP 效果.h 包含进来,并修改struct isp_cfg_arraycfg_arr[] 结构体;其中参数定义:
(1)Sensor 模块名称:sensor_mipi (2)ISP 效果头文件名称 (3)分辨率宽 (4)分辨率高 (5)帧率 (6)红外IR 模式标志位 (7)WDR 模式标志位 (8)ISP 参数结构体
4.5 如何输出RAW 数据
在ioctl 的VIDIOC_S_FMT 命令,将其参数pixelformat 设置为RAW 格式即可,RAW 格式如下:
V4L2_PIX_FMT_SBGGR8
V4L2_PIX_FMT_SGBRG8
V4L2_PIX_FMT_SGRBG8
V4L2_PIX_FMT_SRGGB8
V4L2_PIX_FMT_SBGGR10
V4L2_PIX_FMT_SGBRG10
V4L2_PIX_FMT_SGRBG10
V4L2_PIX_FMT_SRGGB10
V4L2_PIX_FMT_SBGGR12
V4L2_PIX_FMT_SGBRG12
V4L2_PIX_FMT_SGRBG12
V4L2_PIX_FMT_SRGGB12
将pixelformat 设置为上述的其一即可输出RAW 数据, 而如何选择上述的操作, 这个根据sensor 驱动选择, 如果驱动中sensor_formats 的mbus_code 设置为
MEDIA_BUS_FMT_SBGGR10_1X10,则在输出RAW 数据时将pixelformat 设置为V4L2_PIX_FMT_SBGGR10
当前camerademo 已经支持输出RAW 数据,可参照本文档《camerademo 输出RAW 数据》章节。
4.6 如何计算实际曝光时间
该部分为使用到ISP 的RAW sensor 配置信息。曝光时间的计算和曝光控制寄存器、hts、pclk这些配置相关,这些配置都在sensor 驱动,ISP 将会根据sensor 驱
动中的设置计算相应的曝光时间,所以驱动中的配置必须正确,否则在调试ISP 效果可能会遇到其他的一些问题。
static struct sensor_win_size sensor_win_sizes[] = {
...
.hts = 928,
.vts = 1720,
.pclk = 48 * 1000 * 1000,
...
}
在sensor 的驱动中有以上的一些配置,曝光时间在驱动中是以曝光行为计算单位的,即在sensor_s_exp() 函数中设置的参数为曝光行,部分sensor 是以16 为一
倍的,所以在计算实际的曝光行时,需要将上述函数参数除以16。
曝光时间= 曝光行× hts / pclk
一般的pclk 都是M 级别的,所以时间单位为us,部分sensor 的曝光行为参数的十六分之一,需要除以十六,同时,曝光行不能大于vts 的值,否则将会出现降
帧、没有正常输出图像等问题。
4.7 如何脱离isp tuning 工具微调图像亮度
在isp 配置文件中,有类似以下的信息:
上述ae_cfg 参数的倒数第4 个数值(130)即是控制图像亮度的阀门(期望亮度),该值越大,图像亮度越高。ae_cfg 一共14 个,分别对应着不同的环境亮度
(Lux)。如何确定AE 当前处于哪组ae_cfg 参数呢?修改isp 配置文件中的isp_log_param = 0x1,然后重新编译运行相机应用,留意应用中关于isp 的打印信息:
[ISP_DEBUG]: isp0 ae_target 92, pic_lum 0, weight_lum 0, delta_exp_idx 138, ae_delay 0, AE_TOLERANCE
5
从上述信息可以看到当前的目标亮度是92,这时可以查看isp 配置文件ae_cfg 中哪组的阀门处于92 这个范围,如果需要增加亮度,则提高相应的阀门;降低亮度
则降低阀门。相应的根据实际调试情况修改即可。调试之后,记得将isp_log_param 参数还原为0。
4.8 VIN 如何设置裁剪和缩放
裁剪修改sensor 驱动:在驱动有类似以下的配置
static struct sensor_win_size sensor_win_sizes[] = {
{
.width = VGA_WIDTH,
.height = VGA_HEIGHT,
.hoffset = 0,
.voffset = 0,
.hts = 878,
.vts = 683,
.pclk = 72 * 1000 * 1000,
.mipi_bps = 720 * 1000 * 1000,
.fps_fixed = 120,
.bin_factor = 1,
.intg_min = 1 << 4,
.intg_max = (683) << 4,
.gain_min = 1 << 4,
.gain_max = 16 << 4,
.regs = sensor_VGA_120fps_regs,
.regs_size = ARRAY_SIZE(sensor_VGA_120fps_regs),
.set_size = NULL,
},
};
上述的width height 表示经过isp 输出之后的数据,如果需要裁剪,修改width、height、hoffset 和voffset。裁剪之后的输出width = sensor_output_src -
2hoffset height = sensor_height_src - 2voffset 注意,上述的hoffset voffset 必须为双数。
所以,假设sensor 输出的是640 × 480,我们想裁剪为320 × 240 的,则上述配置修改为:
static struct sensor_win_size sensor_win_sizes[] = {
{
.width = 320,
.height = 240,
.hoffset = 160,
.voffset = 120,
.hts = 878,
.vts = 683,
.pclk = 72 * 1000 * 1000,
.mipi_bps = 720 * 1000 * 1000,
.fps_fixed = 120,
.bin_factor = 1,
.intg_min = 1 << 4,
.intg_max = (683) << 4,
.gain_min = 1 << 4,
.gain_max = 16 << 4,
.regs = sensor_VGA_120fps_regs,
.regs_size = ARRAY_SIZE(sensor_VGA_120fps_regs),
.set_size = NULL,
},
};
缩放配置:使用硬件缩放,可以在应用层通过VIDIOC_S_FMT 设置分辨率的时候,直接设置分辨率的大小为缩放的分辨率即可。
上述的操作,将会使用硬件完成相应的缩放输出。