camera功能测试
6 camera 功能测试
Tina 系统可以通过SDK 中的camerademo 包来验证camera sensor(usb camera)是否移植成功,如果可以正常捕获保存图像数据,则底层驱动、板子硬件正常。
6.1 camerademo 配置
在命令行中进入Tina 根目录,执行make menuconfig 进入配置主界面,并按以下配置路径操作:
首先,选择Allwinner 选项进入下一级配置,如下图所示: 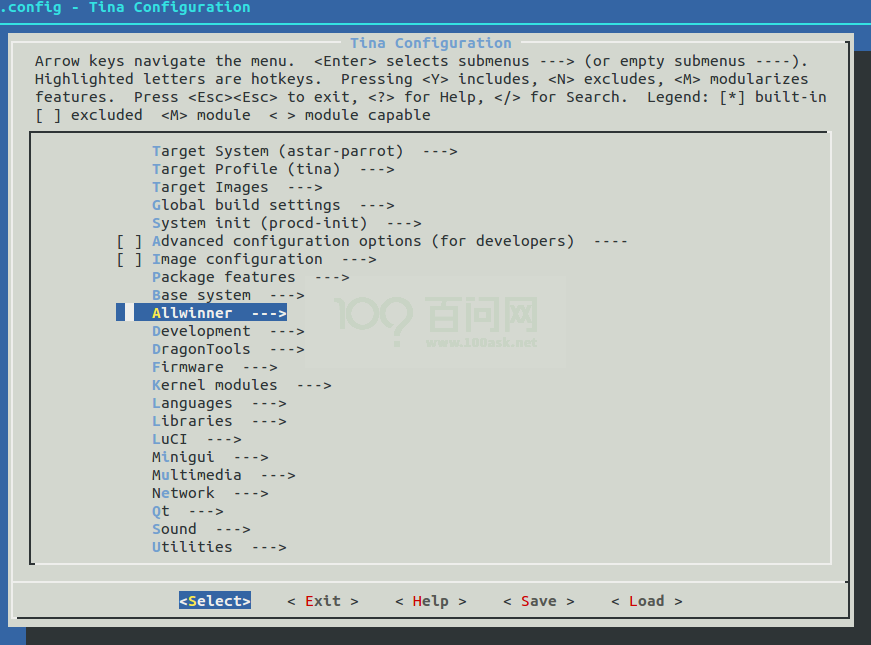
然后,选择camerademo 选项,可选择<*> 表示直接编译包含在固件,也可以选择表示仅编译不包含在固件。当平台的camera 框架是VIN 且需要使用ISP 时,将
需要在camerademo 的选项处点击回车进行以下界面选择使能ISP。(该选项只能在VIN 框架中,使用RAW sensor时使用,在修改该选项之后,需要先单独mm -
B 编译该package)。


6.2 源码结构
camerademo 的源代码位于package/allwinner/camerademo/目录下:
|---src
| camerademo.c //camea测试的主流程代码
| camerademo.h //camera demo相关数据结构
| common.c //实现共用的函数,转换时间、保存文件、测试帧率等
| common.h //共用函数头文件
| convert.c //实现图像格式转换函数
| convert.h //图像格式转换函数头文件
6.3 camerademo 使用方法
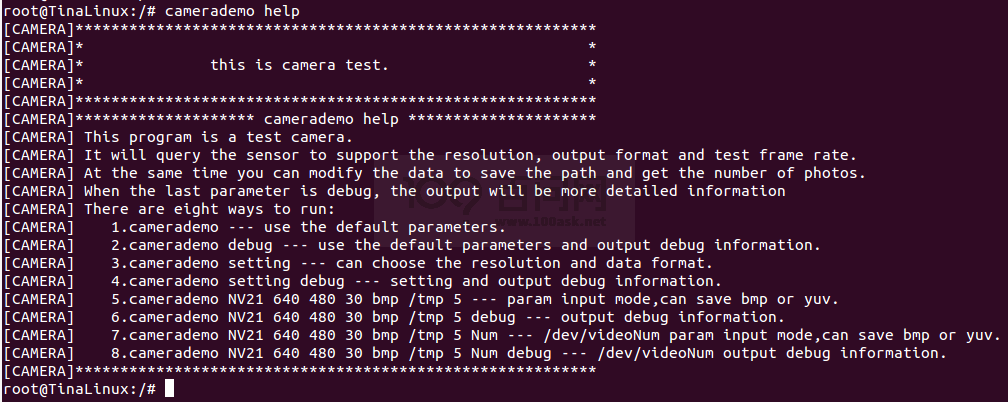
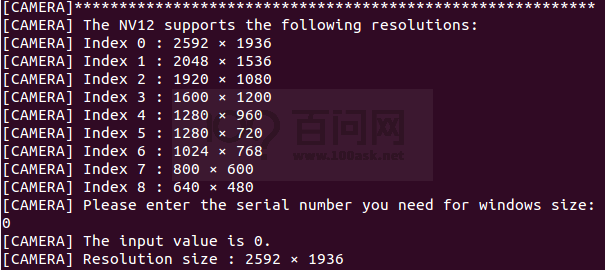
在小机端加载成功后输入camerademo help,假如驱动产生的节点video0(测试默认以/dev/video0 作为设备对象)可以打开则会出现下面提示:
通过提示我们可以得到一些提示信息,了解到该程序的运行方式、功能,可以查询sensor 支持的分辨率、sensor 支持的格式以及设置获取照片的数量、数据保存
的格式、路径、添加水印、测试数据输出的帧率、从open 节点到数据流打通需要的时间等,help 打印信息如下图:
Camerademo 共有4 种运行模式:
- 默认方式:直接输入camerademo 即可,在这种运行模式下,将设置摄像头为640*480 的NV21 格式输出图像数据,并以BMP 和YUV 的格式保存在/tmp 目
录下,而当输入camerademodebug 将会输出更详细的debug 信息;
-
探测设置camerademo setting:将会在运行过程中根据具体camera 要求输入设置参数,当输入camerademo setting debug 的时候,将会输出详细的debug 信息;
-
快速设置:camerademo argv[1] argv[2] argv[3] argv[4] argv[5] argv[6] argv[7],将会按照输入参数设置图像输出,同样,当输入camerademo argv[1]
argv[2] argv[3] argv[4] argv[5] argv[6] argv[7] debug 时将会输出更详细的debug 信息。
- 选择camera 设置:camerademo argv[1] argv[2] argv[3] argv[4] argv[5] argv[6] argv[7] argv[8],将会按照输入参数设置图像输出,同样,当输入
camerademo argv[1] argv[2] argv[3] argv[4] argv[5] argv[6] argv[7] argv[8] debug 时将会输出更详细的debug 信息。
6.3.1 默认方式
当输入camerademo 之后,使用默认的参数运行,则会打印一下信息,如下图:
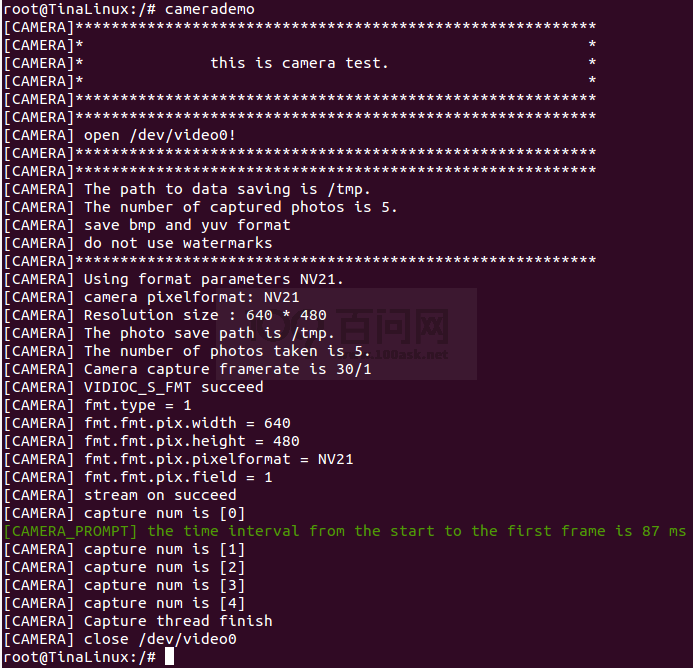
首先可以清楚的看到成功open video0 节点,并且知道照片数据的保存路径、捕获照片的数量以及当前设置:是否添加水印、输出格式、分辨率和从开启流传输到
第一帧数据达到时间间隔等信息。如果需要了解更多的详细信息,可以在运行程序的时候输入参数debug 即运行camerademo debug,将会打开demo 的debug
模式,输出更详细的信息,包括camera 的驱动类型,支持的输出格式以及对应的分辨率,申请buf 的信息,实际输出帧率等。
6.3.2 选择方式
在选择模式下有两种运行方式,一种是逐步选择,在camera 的探测过程,知道其支持的输出格式以及分辨率之后再设置camera 的相关参数;另一种是直接在运
行程序的时候带上相应参数,程序按照输入参数运行(其中还可以选择camera 索引,从而测试不同的camera)。
- 输入camerademo setting,则按照程序的打印提示输入相应选择信息即可。 • 输入保存路径、照片数量、保存的格式等。

• 选择输出格式。
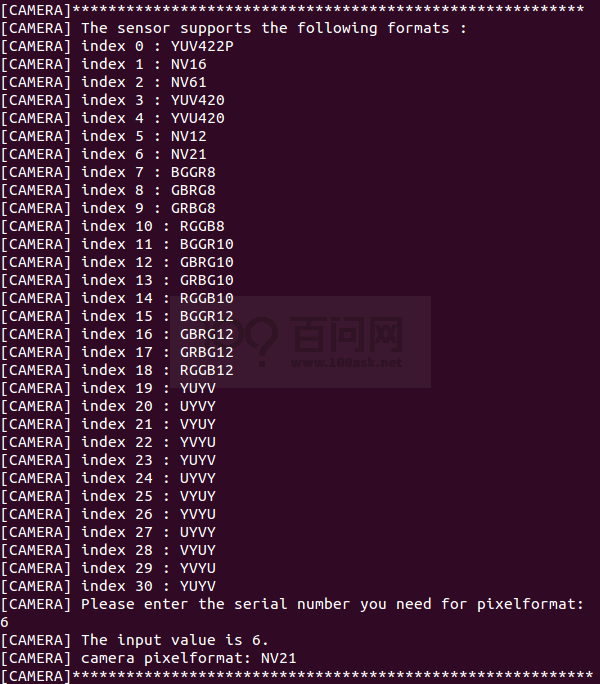
• 选择输出图像分辨率。
其它信息与默认设置一致,如需打印详细的信息,运行camerademo setting debug 即可。
- 第二种是设置参数: • 默认的video 0 节点:camerademo argv[1] argv[2] argv[3] argv[4] argv[5] argv[6] argv[7]。 输入参数代表意义如下:
argv[1]:camera输出格式---NV21 YUYV MJPEG等;
argv[2]:camera分辨率width;
argv[3]:camera分辨率height;
argv[4]:sensor输出帧率;
argv[5]:保存照片的格式:all---bmp和yuv格式都保存、bmp---仅以bmp格式保存、yuv---仅以yuv格式保存;
argv[6]:捕获照片的保存路径;
argv[7]:捕获照片的数量;
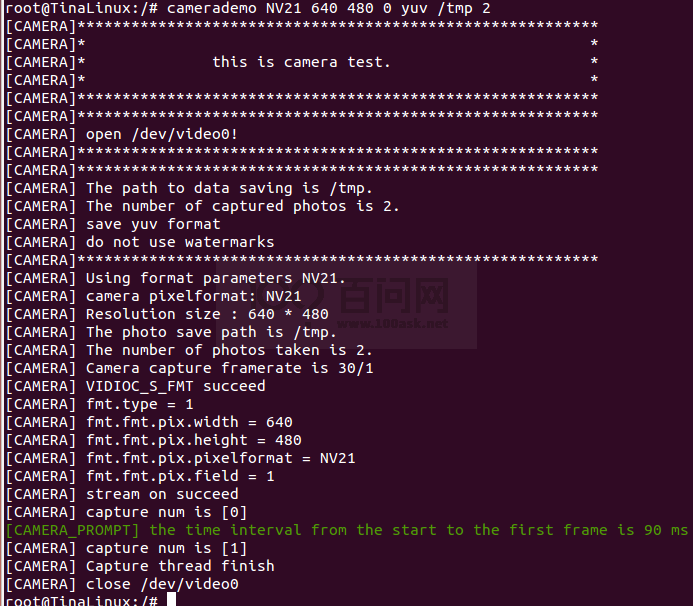
例如:camerademo NV21 640 480 30 yuv /tmp 2,将会输出640*480@30fps 的NV21格式照片以yuv 格式、不添加水印保存在/tmp 路径下,照片共2 张。
其它信息与默认设置一致,如需打印详细的信息,运行camerademo argv[1] argv[2] argv[3] argv[4] argv[5] argv[6] argv[7] debug 即可。
• 选择其他的video 节点:camerademo argv[1] argv[2] argv[3] argv[4] argv[5] argv[6] argv[7] argv[8]。
输入参数代表意义如下:
argv[1]:camera输出格式---NV21 YUYV MJPEG等;
argv[2]:camera分辨率width;
argv[3]:camera分辨率height;
argv[4]:sensor输出帧率;
argv[5]:保存照片的格式:all---bmp和yuv格式都保存、bmp---仅以bmp格式保存、yuv---仅以yuv格式保存;
argv[6]:捕获照片的保存路径;
argv[7]:捕获照片的数量;
argv[8]:video节点索引;
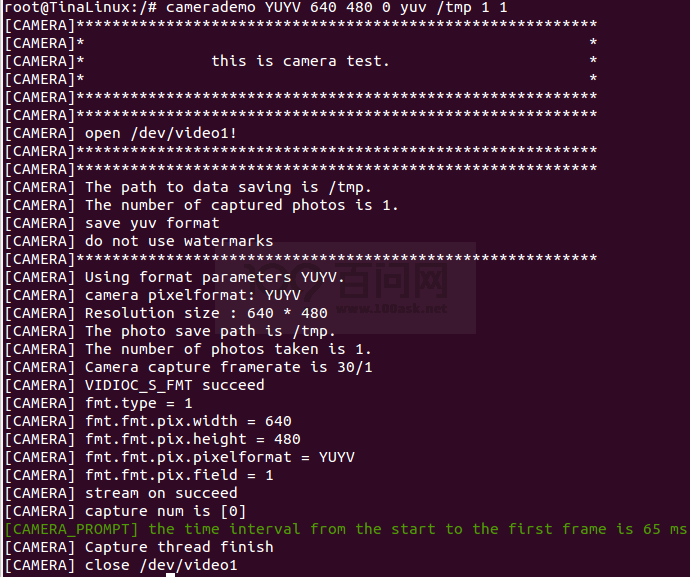
例如:camerademo YUYV 640 480 30 yuv /tmp 1 1,将会打开/dev/video1 节点并输出640*480@30fps 的以yuv 格式、不添加水印保存在/tmp 路径下,照片共
1 张。
其它信息与默认设置一致,如需打印详细的信息,运行camerademo argv[1] argv[2] argv[3] argv[4] argv[5] argv[6] argv[7] argv[8] debug 即可。
6.3.3 camerademo 保存RAW 数据
当需要使用camerademo 保存RAW 数据时,只需要将输出格式设置为RAW 格式即可。先确认sensor 驱动中的mbus_code 设置为多少位, 假设驱动中, 配置为
mbus_code =MEDIA_BUS_FMT_SGRBG10_1X10,那么可以确认sensor 输出是RAW10,camerademo 的输出格式设置为RAW10 即可。比如输入camerademo
RGGB10 1920 1080 30 bmp /tmp 5,以上命令输出配置sensor 输出RAW 数据并保存在/tmp 目录,命令的含义参考本章节的《选择方式》。
注意:RAW 数据文件的保存后缀是.raw 。
6.3.4 debug 信息解析
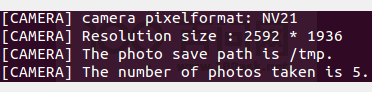
以下debug 信息将说明sensor 驱动的相关信息,拍摄到的照片保存位置、数量、保存的格式以及水印使用情况等:
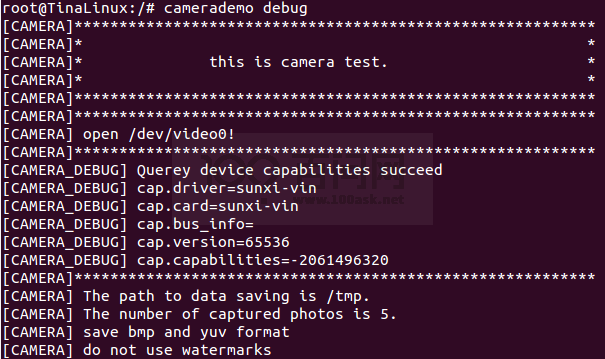
以下debug 信息将说明驱动框架支持的格式以及sensor 支持的输出格式:
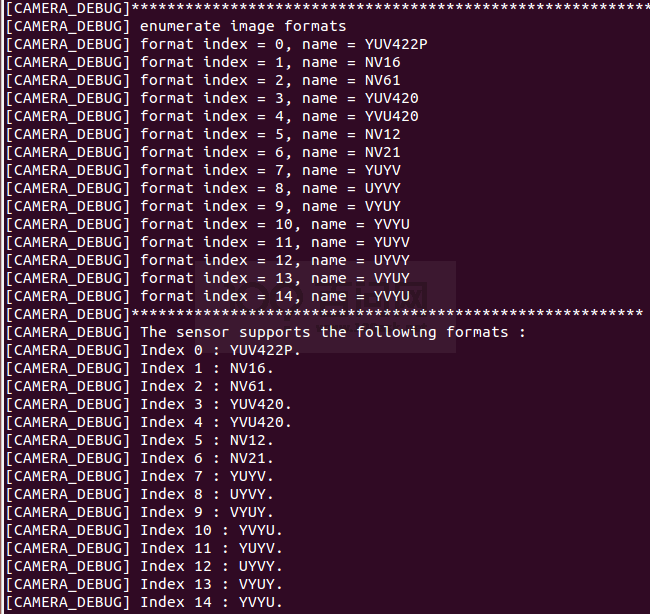
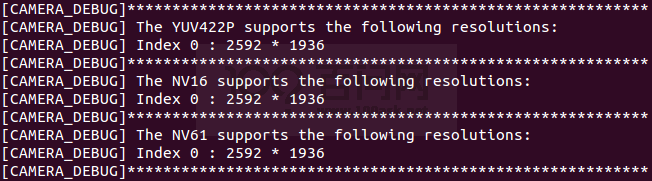
类似以下的信息代表这相应格式支持的分辨率信息:
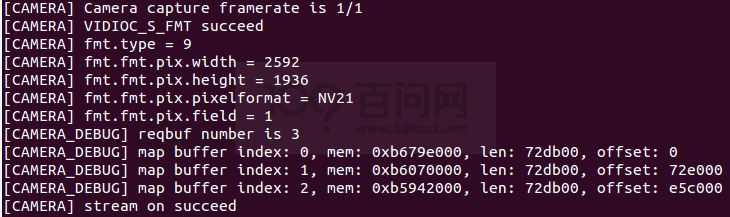
以下信息将会提示将要设置到sensor 的格式和分辨率等信息:
以下信息将会提示设置格式的情况,buf 的相应信息等:
以下信息将提示当前拍照的照片索引以及从开启流传输到dqbuf 成功的时间间隔:

以下信息提示该sensor 的实际测量帧率信息:

以下信息提示从open 节点到可以得到第一帧数据的时间间隔,默认设置为测试拍照的相应设置:

6.3.5 文件保存格式
设置完毕之后,将会在所设路径(默认/tmp)下面保存图像数据,数据分别有两种格式,一种是YUV 格式,以source_ 格式.yuv 名称保存;一种是BMP 格式,以
bmp_ 格式.bmp 格式保存,如下图所示。
查看图像数据时,需要通过adb pull 命令将相应路径下的图像数据pull 到PC 端查看。
6.4 select timeout 了,如何操作?
在完成sensor 驱动的移植,驱动模块正常加载,I2C 正常通信,将会在/dev 目录下创建相应的video 节点,之后可以使用camerademo 进行捕获测试,如果出现
select timeout,end capture thread!,这个情况可按照以下操作进行debug。
- 先和模组厂确认,当前提供的寄存器配置是否可以正常输出图像数据。有些模组厂提供的寄存器配置还需要增加一个使能寄存器,这些可以在sensor
datasheet 上查询得到或者与模组厂沟通;
- 通过dmesg 命令, 查看在运行camerademo 的过程中内核是否有异常的打印。在MR813/R818 平台,内核出现tdm 相关字段的连续打印,则需要确认,
board.dts 中的isp配置是否正确,单摄的配置,isp_sel 和tdm_rx_sel 都需要配置为0;双摄的则需要先运行配置为isp0 的video 节点才能再运行isp1 的video
节点;
- 其他的按照是并口还是mipi 接口进行相应的debug;
6.4.1 DVP sensor
- 确定sensor 的出图data 配置正确,是8 位的、10 位的、12 位的?确认之后,检查驱动中的sensor_formats 和sys_config.fex 中的csi data pin 设置是否正
确;
-
MCLK 的频率配置是否正确;
-
sensor 驱动的sensor_g_mbus_config() 函数配置为DVP sensor,type 需要设置为V4L2_MBUS_PARALLEL;
-
确定输出的data 是高8 位、高10 位,确定硬件引脚配置没有问题;
-
示波器测量VSYNC、HSYNC 有没有波形输出,这两个标记着有一场数据、一行数据信号产 生;
-
测量data 脚有没有波形,电压幅值是否正常;
-
如果没有波形,检查一下sensor 的寄存器配置,看看有没有软件复位的操作,如果有,在该寄存器配置后面加上”{REG_DLY,0xff}“进行相应的延时,防止在
软件复位的时候,sensor还没有准备好就I2C 配置寄存器;
- 如果上面都还是没有接收到数据,那么在sensor 的驱动文件,有以下配置,这三个宏定义的具体值。每个都有两种配置,将这三个宏的配置两两组合,共8 种
配置,都尝试一下;
#define VREF_POL V4L2_MBUS_VSYNC_ACTIVE_HIGH
#define HREF_POL V4L2_MBUS_HSYNC_ACTIVE_HIGH
#define CLK_POL V4L2_MBUS_PCLK_SAMPLE_RISING
6.4.2 mipi sensor
如果mipi sensor 没有正常出图,做以下debug 操作:
- mipi 接口和主控板子连接不要飞线,mipi 信号本身就是高频差分信号,布线时都要求高,飞线更会影响其信号质量,导致无法正常接收数据;
- 确认sensor 驱动设置的mipi 格式,同样是查看sensor_g_mbus_config() 函数(lane 和通道数);
- 示波器测量mipi 接口的data 线、时钟线,看看有没有数据输出;
- 检查一下寄存器配置方面有没有软件复位的,增加相应的延时;
- 和模组厂商确认sensor 驱动中对应分辨率的sensor_win_sizes 以下参数配置是否与寄存器组配合的,因为这些参数将会影响mipi 接收数据;
.hts = 3550, .vts = 1126, .pclk = 120 * 1000 * 1000, .mipi_bps = 480 * 1000 * 1000,
上面的hts,又称line_length_pck,VTS 又称frame_length_lines,与寄存器的值要一致,Pclk(Pixel clock) 的值由PLL 寄存器计算得出,可简单计算,pclk = hts ×
vts × fps;而mipi_bps 为mipi 数据速率,mipi_bps = hts × vts × fps ×(12bit/10bit/8bit)/ lane。
有些sensor 的datasheet 没有标注hts 和vts 的,但是他们有H Blanking 和Vertical blanking,他们的转换公式是:
hts = H Blanking + output_width
vts = Vertical blanking + output_height
Output_width 就是输出的一行的大小,output_height 就是输出的一列的大小。
gc 厂的sensor,vts = VB + win_height + 16;VB 和win_height 都是可以从寄存器中获取得到的,注意,win_height 是寄存器值,而不是输出的高。
6.4.3 其他注意事项
6.4.3.1 R311、MR133
sensor_sel
在vin 框架中,sys_config.fex 有以下配置:
[vind0/sensor0]
...
[vind0/sensor1]
...
[vind0/vinc0]
vinc0_used = 1
vinc0_csi_sel = 0
vinc0_mipi_sel = 0
vinc0_isp_sel = 0
vinc0_rear_sensor_sel = 0
vinc0_front_sensor_sel = 0
vinc0_sensor_list = 0
在这里主要是需要注意vinc0_rear_sensor_sel 和vinc0_front_sensor_sel 的配置,当它们都配置为0,表明vind0/vinc0 配置的video0 节点,使用的是
vind0/sensor0 节点中配置的sensor 输出图像数据;当它们配置为0、1,表明vind0/vinc0 配置的video0 节点,可以使用vind0/sensor0 和vind0/sensor1 两个
sensor 输出图像数据,可以通过ioctl 的VIDIOC_S_INPUT 的index 选择使用哪个sensor 的输出;当它们都配置为1 的时候,表明vind0/vinc0 配置的video0 节
点,使用的是vind0/sensor1 的输出。
mipi AB 配置
mipi 配置方面,还有一个需要注意的,该部分在R311、MR133 平台才有这种情况。一般情况,我们使用的是MCSIB 组的mipi 接口,这个按照一般配置使用即
可,MCSIA、MCSIB,这两个会在原理图上表明使用的是哪一组接口,如果单独使用MCSIA 组的mipi 接口,在sys_config.fex 中配置如下: