模块配置
3 模块配置
3.1 kernel menuconfig 配置
进入 longan 根目录,执行./build.sh menuconfig
进入配置主界面,并按以下步骤操作:
首先,选择 Device Drivers 选项进入下一级配置,如下图所示:
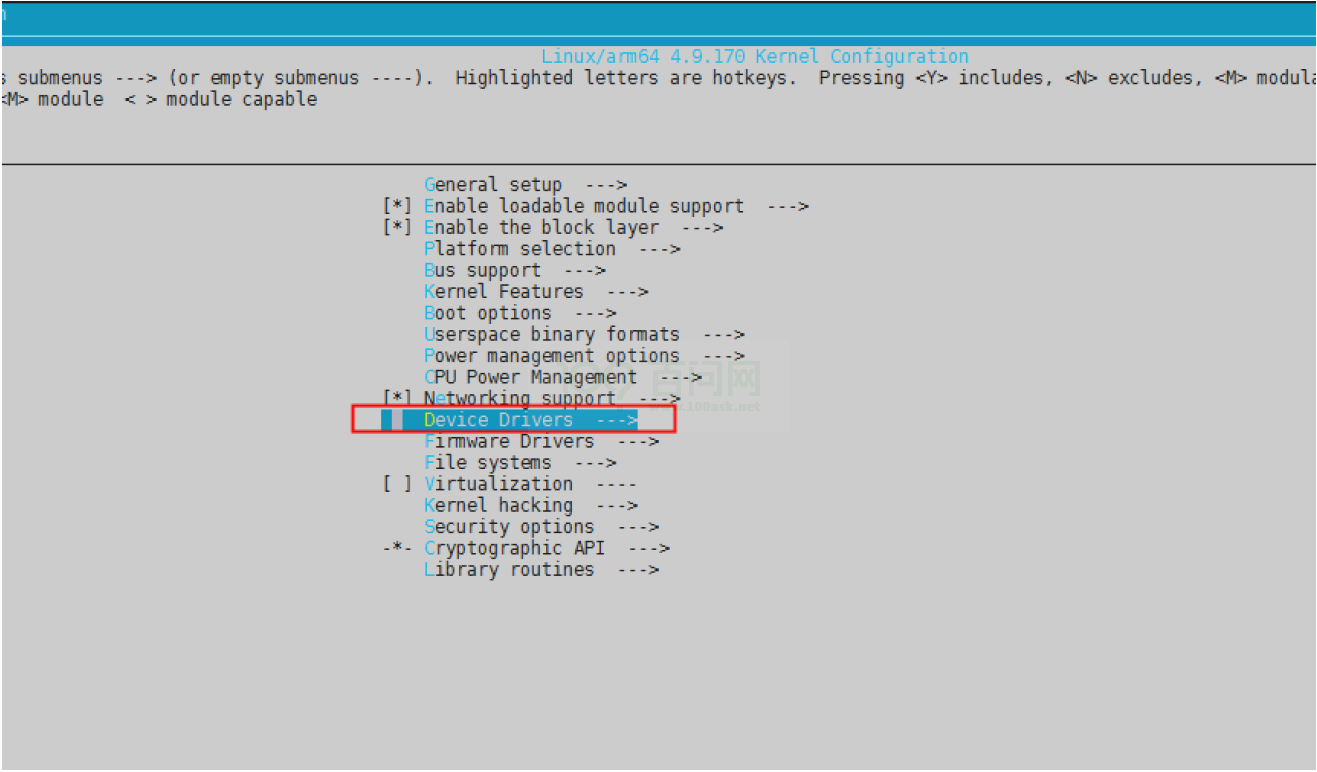
图 3-1: 内核 menuconfig 根菜单
选择 Pin controllers, 进入下级配置,如下图所示:

图 3-2: 内核 menuconfig device drivers 菜单
选择 Allwinner SoC PINCTRL DRIVER, 进入下级配置,如下图所示:
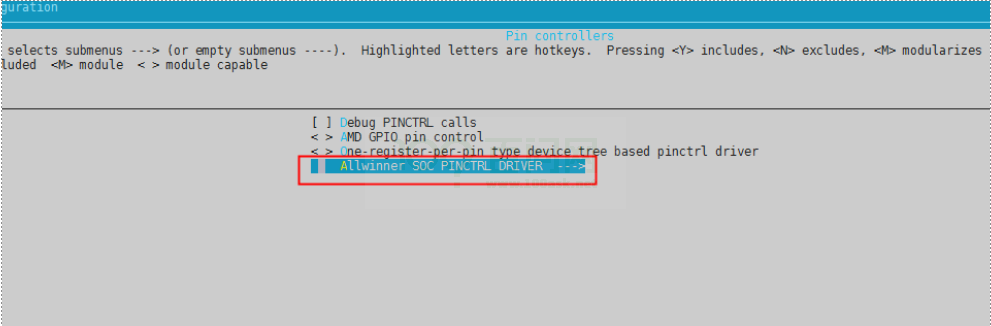
图 3-3: 内核 menuconfig pinctrl drivers 菜单
Sunxi pinctrl driver 默认编译进内核,如下图(以 sun50iw9p1 平台为例,其他平台类似)所示:
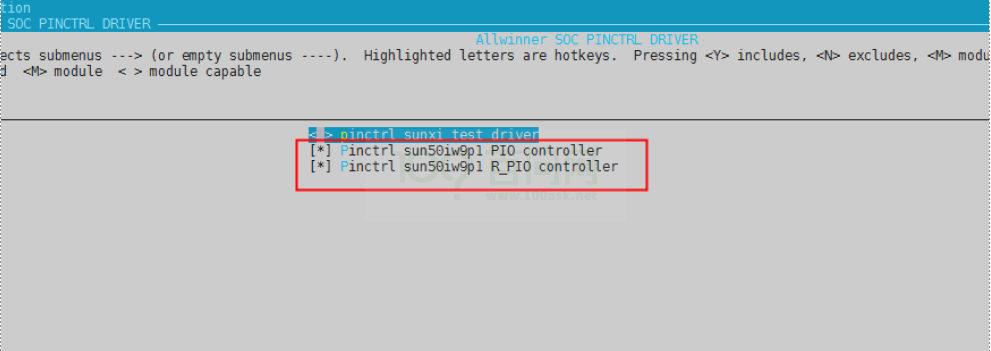
图 3-4: 内核 menuconfig allwinner pinctrl drivers 菜单
3.2 device tree 源码结构和路径
对于 Linux4.9:
• 设备树文件的配置是该 SoC 所有方案的通用配置,对于 ARM64 CPU 而言,设备树的路径为:kernel/{KERNEL}/arch/arm64/boot/dts/sunxi/sun*-pinctrl.dtsi。
• 设备树文件的配置是该 SoC 所有方案的通用配置,对于 ARM32 CPU 而言,设备树的路径为:kernel/{KERNEL}/arch/arm32/boot/dts/sun*-pinctrl.dtsi。
• 板级设备树 (board.dts) 路径:/device/config/chips/{IC}/configs/{BOARD}/board.dts
device tree 的源码结构关系如下:
对于 Linux5.4:
• 设备树文件的配置是该 SoC 所有方案的通用配置,对于 ARM64 CPU 而言,5.4 内核中不再维护单独的 pinctrl 的 dtsi,直接将 pin 的信息放在了:kernel/{KERNEL}/arch/arm32/boot/dts/sun*.dtsi
• 设备树文件的配置是该 SoC 所有方案的通用配置,对于 ARM32 CPU 而言,5.4 内核中不再维护单独的 pinctrl 的 dtsi,直接将 pin 的信息放在了:kernel/{KERNEL}/arch/arm32/boot/dts/sun*.dtsi
• 板级设备树 (board.dts) 路径:/device/config/chips/{IC}/configs/{BOARD}/board.dts
• device tree 的源码包含关系如下:
3.2.1 device tree 对 gpio 控制器的通用配置
在 kernel/{KERNEL}/arch/arm64/boot/dts/sunxi/sun*-pinctrl.dtsi* 文件中 (Linux5.4 直接放在 sun.dtsi 中),配置了该 SoC 的 pinctrl 控制器的通用配置信息,一般不建议修改,有 pinctrl 驱动维护者维护。目前,在 sunxi 平台,我们根据电源域,注册两个 pinctrl 设备:r_pio 设 备 (PL0 后的所有 pin) 和 pio 设备 (PL0 前的所有 pin),两个设备的通用配置信息如下:
r_pio: pinctrl@07022000 {
compatible = "allwinner,sun50iw9p1-r-pinctrl"; //兼容属性,用于驱动和设备绑定
reg = <0x0 0x07022000 0x0 0x400>; //寄存器基地址0x07022000和范围0x400
clocks = <&clk_cpurpio>; //r_pio设置使用的时钟
device_type = "r_pio"; //设备类型属性
gpio-controller; //表示是一个gpio控制器
interrupt-controller; //表示一个中断控制器,不支持中断可以删除
#interrupt-cells = <3>; //pin中断属性需要配置的参数个数,不支持中断可以删除
#size-cells = <0>; //没有使用,配置0
#gpio-cells = <6>; //gpio属性配置需要的参数个数,对于linux-5.4为3
/*
* 以下配置为模块使用的pin的配置,模块通过引用相应的节点对pin进行操作
* 由于不同板级的pin经常改变,建议通过板级dts修改(参考下一小节)
*/
s_rsb0_pins_a: s_rsb0@0 {
allwinner,pins = "PL0", "PL1";
allwinner,function = "s_rsb0";
allwinner,muxsel = <2>;
allwinner,drive = <2>;
allwinner,pull = <1>;
};
/*
* 以下配置为linux-5.4模块使用pin的配置,模块通过引用相应的节点对pin进行操作
* 由于不同板级的pin经常改变,建议将模块pin的引用放到board dts中
*(类似pinctrl-0 = <&scr1_ph_pins>;),并使用scr1_ph_pins这种更有标识性的名字)。
*/
scr1_ph_pins: scr1-ph-pins {
pins = "PH0", "PH1";
function = "sim1";
drive-strength = <10>;
bias-pull-up;
};
};
pio: pinctrl@0300b000 {
compatible = "allwinner,sun50iw9p1-pinctrl"; //兼容属性,用于驱动和设备绑定
reg = <0x0 0x0300b000 0x0 0x400>; //寄存器基地址0x0300b000和范围0x400
interrupts = <GIC_SPI 51 IRQ_TYPE_LEVEL_HIGH>, /* AW1823_GIC_Spec: GPIOA: 83-32=51 */
<GIC_SPI 52 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 53 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 54 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 55 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 56 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 57 IRQ_TYPE_LEVEL_HIGH>; //该设备每个bank支持的中断配置和gic中断号,每个中断号对应一个支持中断的bank
device_type = "pio"; //设备类型属性
clocks = <&clk_pio>, <&clk_losc>, <&clk_hosc>; //该设备使用的时钟
gpio-controller; //表示是一个gpio控制器
interrupt-controller; //表示是一个中断控制器
#interrupt-cells = <3>; //pin中断属性需要配置的参数个数,不支持中断可以删除
#size-cells = <0>; //没有使用
#gpio-cells = <6>; //gpio属性需要配置的参数个数,对于linux-5.4为3
/* takes the debounce time in usec as argument */
}
3.2.2 board.dts 板级配置
board.dts 用于保存每个板级平台的设备信息 (如 demo 板、demo2.0 板等等),以 demo 板为例,board.dts 路径如下:
/device/config/chips/{CHIP}/configs/demo/board.dts
在 board.dts 中的配置信息如果在 *.dtsi 中 (如 sun50iw9p1.dtsi 等) 存在,则会存在以下覆盖规则:
• 相同属性和结点,board.dts 的配置信息会覆盖 *.dtsi 中的配置信息。
• 新增加的属性和结点,会追加到最终生成的 dtb 文件中。
linux-4.9 上面 pinctrl 中一些模块使用 board.dts 的简单配置如下:
pio: pinctrl@0300b000 {
input-debounce = <0 0 0 0 0 0 0>; /*配置中断采样频率,每个对应一个支持中断的bank,单位us*/
spi0_pins_a: spi0@0 {
allwinner,pins = "PC0", "PC2", "PC4";
allwinner,pname = "spi0_sclk", "spi0_mosi", "spi0_miso";
allwinner,function = "spi0";
};
};
对于 linux-5.4,不建议采用上面的覆盖方式,而是修改驱动 pinctrl-0 引用的节点。
linux-5.4 上面 board.dts 的配置如下: