模块介绍
2 模块介绍
2.1 模块功能介绍
-
Video input 主要由接口部分(CSI/MIPI)和图像处理单元(ISP/VIPP)组成;
-
CSI/MIPI 部分主要实现视频数据的捕捉;
-
ISP 实现 sensor raw data 数据的处理,包括 lens 补偿、去坏点、gain、gamma、de-mosaic、de-noise、color matrix 等以及一些 3A 的统计;
-
VIPP 能对将图进行缩小、和打水印处理。VIPP 支持 bayer raw data 经过 ISP 处理后再缩小,也支持对一般的 YUV 格式的 sensor 图像直接缩小。
2.2 相关术语介绍
| 相关术语 | 解释说明 |
|---|---|
| ISP | Image Signal Processor 图像信号处理 |
| VIPP | Video Input Post Processor 图像输入后处理 |
| MIPI | Mobile Industry Processor Interface 移动工业处理接口 |
| CCI | Camera Control Interface 摄像头控制接口 |
| TDM | Time division multiplexing ISP 时分复用 |
| MCLK | Master clock(From AP to camera)摄像头主时钟 |
| PCLK | Pixel clock(From camera to AP,Sampling clock for data-bus)像素时钟 |
| YUV | Color Presentation(Y for luminance,U&V for Chrominance)图像数据格式 |
2.3 驱动框架介绍
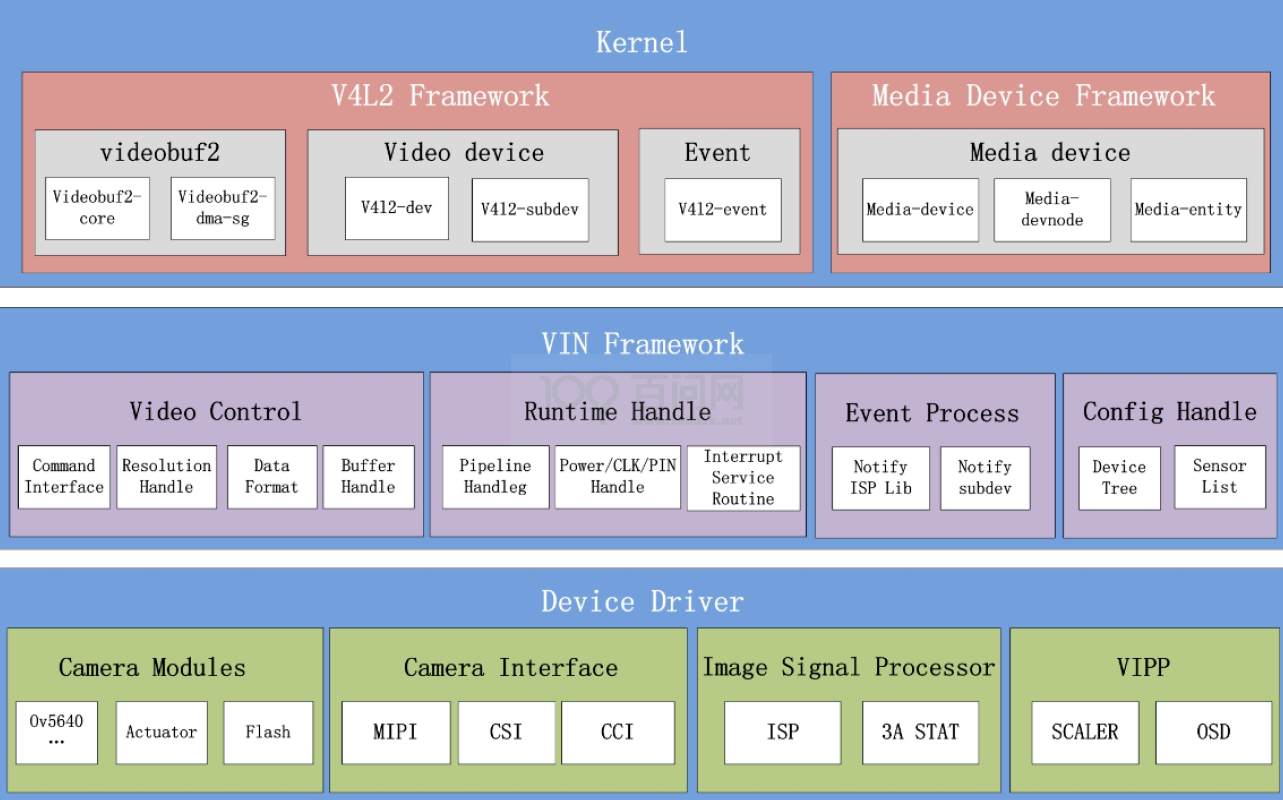
图 2-1: 驱动框图
VIN 驱动可以分为 Kernel 层、Video Input Framework、Device Driver 层。
2.3.1 Kernel 层
-
V4l2 Framework;
-
Linux 内核视频驱动第二版(Video for Linux Two );
3) 适用于收音机、视频编解码、视频捕获以及视频输出设备驱动;
4) 提供/dev/videoX 节点,应用通过该节点进行相应视频流和控制操作;
-
Media Device Framework;
-
Linux 多媒体设备框架;
7) 适用于管理设备拓扑结构;
8) 提供/dev/mediaX 节点,通过该节点应用可以获取媒体设备拓扑结构,并能够通过 API 控制子设备间数据流向。
2.3.2 Video Input Framework 层
-
Video Control : 视频命令处理(分辨率协商,数据格式处理,Buffer 管理等);
-
Runtime Handle : 运行时管理(Pipeline 管理,系统资源管理,中断调度等);
-
Event Process : 事件管理(如上层调用,中断等事件的接收与分发);
-
Config Handle : 配置管理(如硬件拓扑结构,模组自适应列表等)。
2.3.3 Device Driver 层
-
Camera Modules : 模组驱动(图像传感器,对焦电机,闪光灯等驱动);
-
Camera Interfac : 接口驱动(MIPI、Sub-Lvds 、HiSpi、Bt656、Bt601、Bt1120、DC等);
-
Image Signal Processor : 图像处理器驱动(基本处理模块驱动,3A 统计驱动);
-
Video Input Post Processor : 视频输入后处理(Scaler,OSD 等)。
2.4 模块配置介绍
2.4.1 kernel menuconfig 配置
- 首先,进入 Device Drivers,选择 Multimedia support ,然后依次打开 Cameras/video grabbers support 、Media Controller support 和 SUNXI platform devices, 如下图所示。
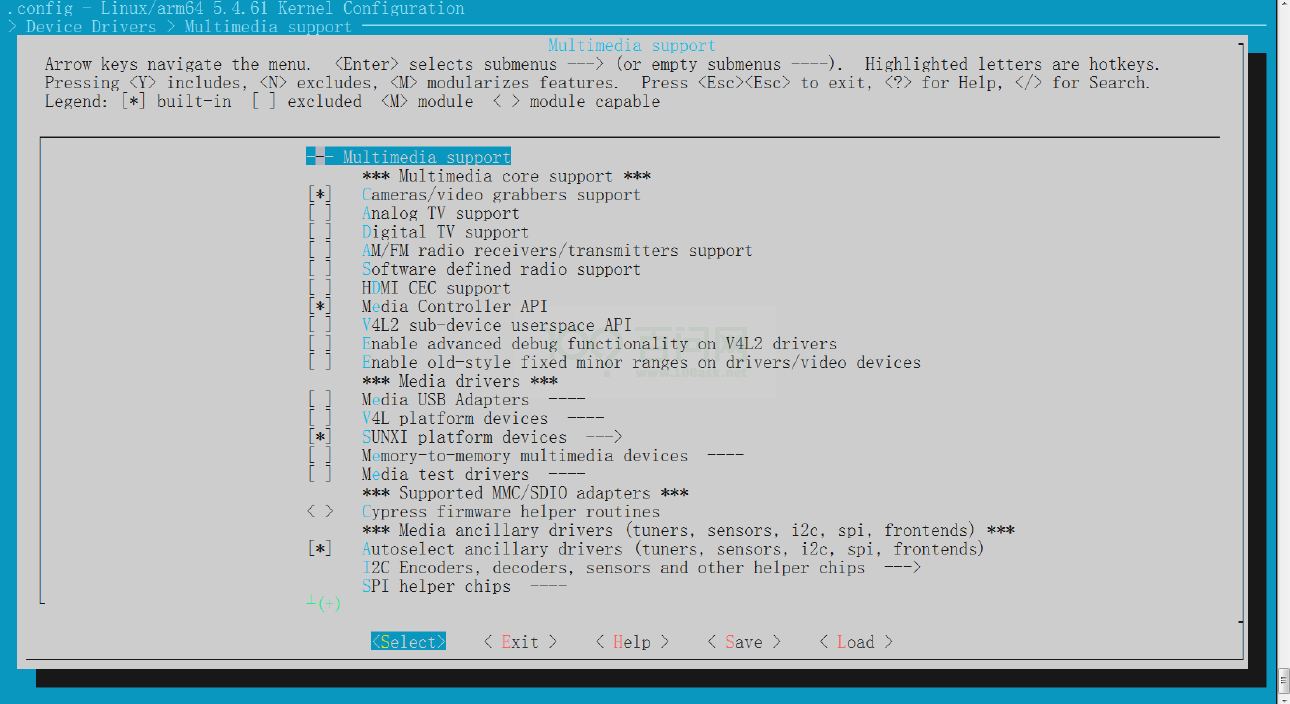
图 2-2: Device Drivers 选项配置
- 其次,进入 SUNXI platform devices,选择 sunxi video input (camera csi/mipi isp vipp)driver 和 v4l2 new driver for SUNXI,如下图所示。
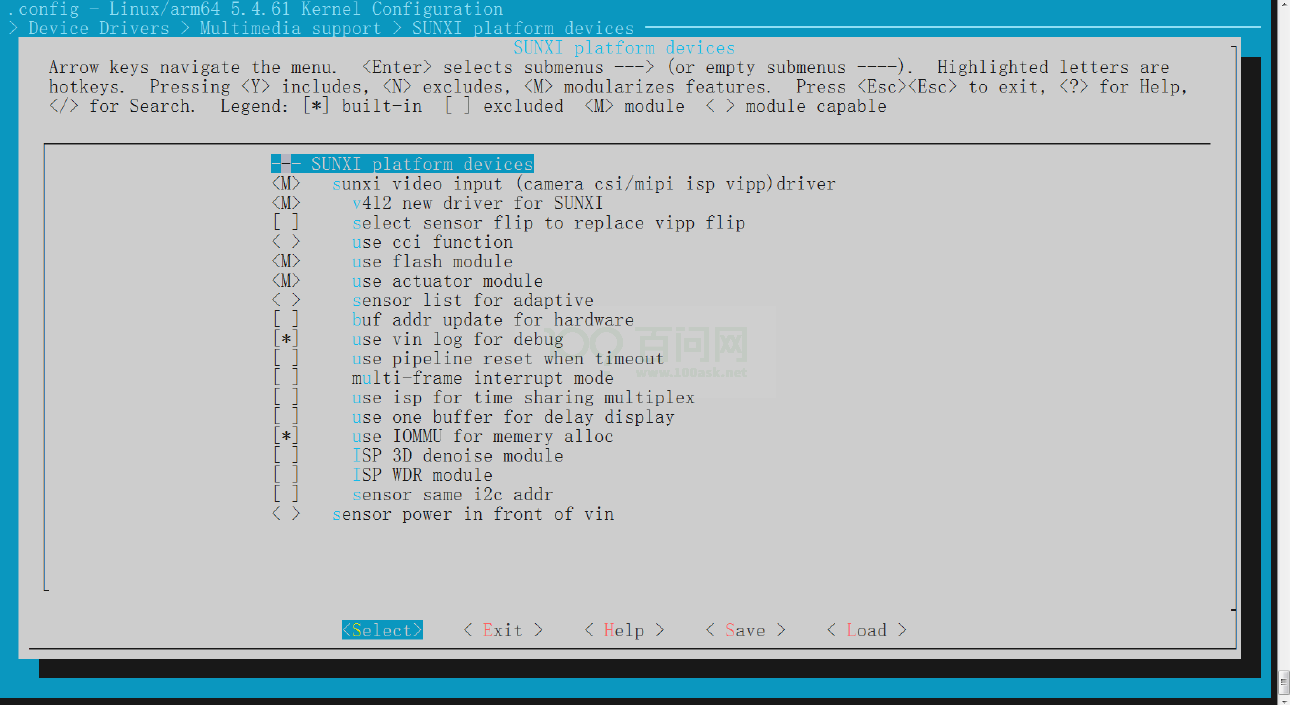
图 2-3: Device Drivers 选项配置
- 最后,sunxi video input (camera csi/mipi isp vipp)driver 目录下的其他选项需要根据实际产品需求进行开关,如:使用闪光灯、对焦马达、打开 vin log、使用 IOMMU 如下图所示。
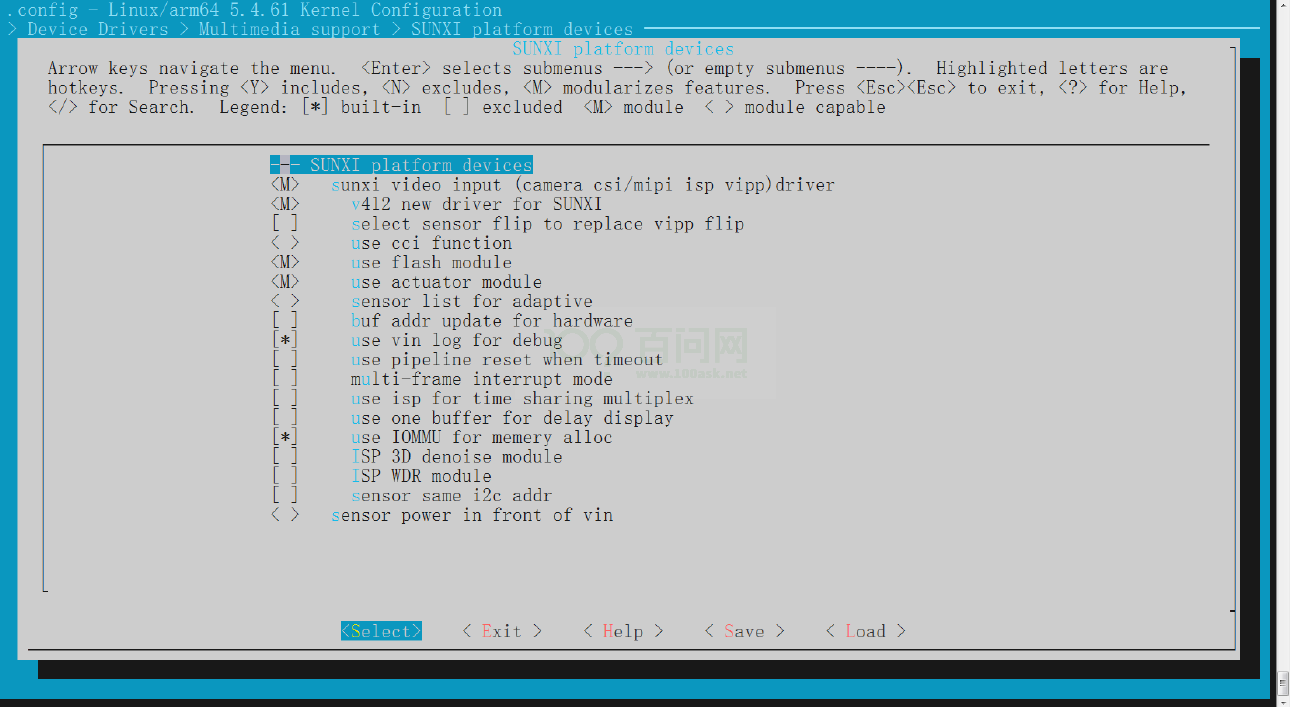
图 2-4: Device Drivers 选项配置
2.4.2 Device Tree 配置说明
• 设备树文件的配置是该 SoC 所有方案的通用配置,对于 ARM64 CPU 而言,设备树的路径为:kernel/{KERNEL_VERSION}/arch/arm64/boot/dts/sunxi/sun*.dtsi。
• 设备树文件的配置是该 SoC 所有方案的通用配置,对于 ARM32 CPU 而言,设备树的路径为:kernel/{KERNEL_VERSION}/arch/arm/boot/dts/sun*.dtsi。
• 板级设备树 (board.dts) 路径:
/device/config/chips/{IC}/configs/{BOARD}/KERNEL_VERSION/board.dts。
在 sun*.dtsi* 文件中,配置了该 SoC 的 CSI 控制器的通用配置信息,一般不建议修改,由 CSI 驱动维护者维护,如果需要修改配置请修改板级设备树 board.dts,板级设备树里面的内容会覆盖*sun*.dtsi 对应的信息。
• vind 配置
&vind0 {
vind0_clk = <336000000>;
vind0_isp = <300000000>;
status = "okay";
tdm0:tdm@0 {
work_mode = <0>;
};
isp00:isp@0 {
work_mode = <0>;
};
scaler00:scaler@0 {
work_mode = <0>;
};
scaler10:scaler@4 {
work_mode = <0>;
};
scaler20:scaler@8 {
work_mode = <0>;
};
scaler30:scaler@12 {
work_mode = <0>;
};
actuator0:actuator@0 {
device_type = "actuator0";
actuator0_name = "ad5820_act";
actuator0_slave = <0x18>;
actuator0_af_pwdn = <>;
actuator0_afvdd = "afvcc-csi";
actuator0_afvdd_vol = <2800000>;
status = "disabled";
};
flash0:flash@0 {
device_type = "flash0";
flash0_type = <2>;
flash0_en = <>;
flash0_mode = <>;
flash0_flvdd = "";
flash0_flvdd_vol = <>;
status = "disabled";
};
sensor0:sensor@0 {
device_type = "sensor0";
sensor0_mname = "gc2053_mipi";
sensor0_twi_cci_id = <1>;
sensor0_twi_addr = <0x6e>;
sensor0_mclk_id = <0>;
sensor0_pos = "rear";
sensor0_isp_used = <1>;
sensor0_fmt = <1>;
sensor0_stby_mode = <0>;
sensor0_vflip = <0>;
sensor0_hflip = <0>;
sensor0_iovdd-supply = <®_aldo2>;
sensor0_iovdd_vol = <1800000>;
sensor0_avdd-supply = <®_bldo2>;
sensor0_avdd_vol = <2800000>;
sensor0_dvdd-supply = <®_dldo2>;
sensor0_dvdd_vol = <1200000>;
sensor0_power_en = <>;
sensor0_reset = <&pio PA 18 1 0 1 0>;
sensor0_pwdn = <&pio PA 19 1 0 1 0>;
sensor0_sm_hs = <>;
sensor0_sm_vs = <>;
flash_handle = <&flash0>;
act_handle = <&actuator0>;
status = "okay";
};
sensor1:sensor@1 {
device_type = "sensor1";
sensor1_mname = "imx386_mipi_2";
sensor1_twi_cci_id = <0>;
sensor1_twi_addr = <0x20>;
sensor1_mclk_id = <1>;
sensor1_pos = "front";
sensor1_isp_used = <1>;
sensor1_fmt = <1>;
sensor1_stby_mode = <0>;
sensor1_vflip = <0>;
sensor1_hflip = <0>;
sensor1_iovdd-supply = <®_aldo2>;
sensor1_iovdd_vol = <1800000>;
sensor1_avdd-supply = <®_bldo2>;
sensor1_avdd_vol = <2800000>;
sensor1_dvdd-supply = <®_dldo2>;
sensor1_dvdd_vol = <1200000>;
sensor1_power_en = <>;
sensor1_reset = <&pio PA 20 1 0 1 0>;
sensor1_pwdn = <&pio PA 21 1 0 1 0>;
sensor1_sm_hs = <>;
sensor1_sm_vs = <>;
flash_handle = <>;
act_handle = <>;
status = "okay";
};
vinc00:vinc@0 {
vinc0_csi_sel = <0>;
vinc0_mipi_sel = <0>;
vinc0_isp_sel = <0>;
vinc0_isp_tx_ch = <0>;
vinc0_tdm_rx_sel = <0>;
vinc0_rear_sensor_sel = <0>;
vinc0_front_sensor_sel = <0>;
vinc0_sensor_list = <0>;
work_mode = <0x0>;
status = "okay";
};
vinc01:vinc@1 {
vinc1_csi_sel = <2>;
vinc1_mipi_sel = <0xff>;
vinc1_isp_sel = <1>;
vinc1_isp_tx_ch = <1>;
vinc1_tdm_rx_sel = <1>;
vinc1_rear_sensor_sel = <0>;
vinc1_front_sensor_sel = <0>;
vinc1_sensor_list = <0>;
status = "disabled";
};
vinc02:vinc@2 {
vinc2_csi_sel = <2>;
vinc2_mipi_sel = <0xff>;
vinc2_isp_sel = <2>;
vinc2_isp_tx_ch = <2>;
vinc2_tdm_rx_sel = <2>;
vinc2_rear_sensor_sel = <0>;
vinc2_front_sensor_sel = <0>;
vinc2_sensor_list = <0>;
status = "disabled";
};
vinc03:vinc@3 {
vinc3_csi_sel = <0>;
vinc3_mipi_sel = <0xff>;
vinc3_isp_sel = <0>;
vinc3_isp_tx_ch = <0>;
vinc3_tdm_rx_sel = <0>;
vinc3_rear_sensor_sel = <1>;
vinc3_front_sensor_sel = <1>;
vinc3_sensor_list = <0>;
status = "disabled";
};
…………
};
其中:
status 是 vin 驱动的总开关,对应的是 media 设备,使用 vin 时必须设为 okay;
vind0_clk 是 vin 模块的时钟,实际使用时可以根据 sensor 的帧率和分辨率来设置;
vind0_isp 是 isp 模块时钟,实际使用时可以根据 sensor 的帧率和分辨率来设置;
vind0_clk 表示 csi clk,计算公式:帧率 x (vts)x (hts)x 1(wdr 则为 2) / 8 / 1(双 pixel则为 2) / 1000000,向上取整,单位为 MH;vind0_isp 表示 isp clk,计算公式:帧率 x 宽 x 高 x 1.2 / 1000000,向上取整,单位为 MH;其中有些 ic 是没有 isp_clk,csi_clk 和isp_clk 都是设置在 vind0_clk。那么 vind0_clk 设置为 csi_clk 和 isp_clk 中最大的数值;
work_mode: 0:online mode 1:offline mode, 根据使用需求配置;
flash0_type: 0:FLASH_RELATING, 1:FLASH_EN_INDEPEND, 2:FLASH_POWER
flash0_en: flash enable gpio, type = 0 of 1
flash0_mode: flash mode gpio, type = 0 of 1
flash0_flvdd: flash module io power handle string, pmu power supply, type = 2
flash0_flvdd_vol: flash module io power voltage, pmu power supply, type = 2
status: 是否使用 flash, disable 代表关,okay 代表开
actuator0_name: vcm name
actuator0_slave: vcm iic slave address
actuator0_af_pwdn: vcm power down gpio
actuator0_afvdd: vcm power handle string, pmu power supply
actuator0_afvdd_vol: vcm power voltage, pmu power supply
status: vcm if used, disable 代表关,okay 代表开
device_type: sensor type sensor0_mname: sensor name
sensor0_twi_cci_id:sensor 所使用的 twi 或者 cci 的 id。
sensor0_twi_addr:sensor 的 twi 地址
sensor0_mclk_id:sensor 所使用的 mclk 的 id。
sensor0_pos:sensor 的位置,前置还是后置,主要用在平板上。
sensor0_isp_used: not use isp 1:use isp
sensor0_fmt: 0:yuv 1:bayer raw rgb
sensor0_stby_mode: not shut down power at standby 1:shut down power at standby
sensor0_vflip: flip in vertical direction 0:disable 1:enable
sensor0_hflip: flip in horizontal direction 0:disable 1:enable
sensor0_iovdd-supply: camera module io power handle string, pmu power supply
sensor0_iovdd_vol: camera module io power voltage, pmu power supply
sensor0_avdd-supply: camera module analog power handle string, pmu power supply
sensor0_avdd_vol: camera module analog power voltage, pmu power supply
sensor0_dvdd-supply: camera module core power handle string, pmu power supply
sensor0_dvdd_vol: camera module core power voltage, pmu power supply
sensor0_power_en: camera module power enable gpio
sensor0_reset: camera module reset gpio
sensor0_pwdn: camera module pwdn gpio sensor0_sm_hs: camera module sm_hs
gpio sensor0_sm_vs: camera module sm_vs gpio status: open or close sensor de
vice flash/actautor/sensor 节点用于对应的外设的开关和配置。这些节点的配置一般需要参
考对应方案的原理图和外设的 data sheet 来完成。
vinc0_csi_sel:表示该 pipeline 上 parser 的 id,必须配置,且为有效 id。
vinc0_mipi_sel:表示该 pipeline 上 mipi(sublvds/hispi)的 id,不使用时配置为 0xff。
vinc0_isp_sel:表示该 pipeline 上 isp 的 id,必须配置,当 isp 为空时,这个 isp 只是表示路由不做 isp 的效果处理。
vinc0_isp_tx_ch 表示该 pipeline 上 isp 的 ch,必须配置,默认为 0。当 sensor 是 bt656 多通道或者 WDR 出 RAW 时,该 ch 可以配置 0~3 的值。
vinc0_tdm_rx_sel: 表示该 pipeline 上 tdm rx 的 ch,必须配置,默认为 0。当不使用 tdm功能时,配置为 0xff;
vinc0_rear_sensor_sel 表示该 pipeline 上使用的后置 sensor 的 id。
vinc0_front_sensor_sel 表示该 pipeline 上使用的前置 sensor 的 id。
vinc0_sensor_list 表示是否使用 sensor_list 来时适配不同的模组,1 表示使用,0 表示不使用。
work_mode: 0:online mode 1:offline mode, 根据使用需求配置;只有 vinc0/4/8/12 可以配置。
status:vipp 的使能开关,okay or disable。
2.5 源码模块结构
驱动路径位于 drivers/media/platform/sunxi-vin 目录。
sunxi-vin:.
├── Kconfig
├── Makefile
├── modules
│ ├── actuator
│ │ ├── actuator.c ;vcm driver的一般行为
│ │ ├── actuator.h ;vcm driver的头文件
│ │ ├── ad5820_act.c ;具体vcm driver型号实现
│ │ ├── an41908a_act.c ;具体vcm driver型号实现
│ │ ├── dw9714_act.c ;具体vcm driver型号实现
│ │ ├── Makefile ;编译文件
│ ├── flash
│ │ ├── flash.c ;led补光灯控制实现
│ │ ├── flash.h ;led补光灯驱动头文件
│ └── sensor
│ ├── ar0238.c ;具体的sensor驱动
│ ├── camera_cfg.h ;camera ioctl扩展命令头文件
│ ├── camera.h ;camera公用结构体头文件
│ ├── gc030a_mipi.c ;具体的sensor驱动
│ ├── gc0310_mipi.c ;具体的sensor驱动
│ ├── gc5024_mipi.c ;具体的sensor驱动
│ ├── imx179_mipi.c ;具体的sensor驱动
│ ├── imx214.c ;具体的sensor驱动
│ ├── imx219.c ;具体的sensor驱动
│ ├── imx317_mipi.c ;具体的sensor驱动
│ ├── Makefile ;驱动的编译文件
│ ├── nvp6134 ;具体的dvp sensor驱动
│ │ ├── acp.c
│ │ ├── acp_firmup.c
│ │ ├── acp_firmup.h
│ │ ├── acp.h
│ │ ├── common.h
│ │ ├── csi_dev_nvp6134.c
│ │ ├── csi_dev_nvp6134.h
│ │ ├── eq.c
│ │ ├── eq_common.c
│ │ ├── eq_common.h
│ │ ├── eq.h
│ │ ├── eq_recovery.c
│ │ ├── eq_recovery.h
│ │ ├── Makefile
│ │ ├── nvp6134c.c ;具体的sensor驱动实现
│ │ ├── type.h
│ │ ├── video.c
│ │ └── video.h
│ ├── nvp6158 ;具体的dvp sensor驱动
│ │ ├── audio.c ;音频部分实现
│ │ ├── audio.h ;音频部分头文件接口
│ │ ├── coax_protocol.c
│ │ ├── coax_protocol.h
│ │ ├── coax_table.h
│ │ ├── common.h
│ │ ├── Makefile
│ │ ├── modules.builtin
│ │ ├── modules.order
│ │ ├── motion.c
│ │ ├── motion.h
│ │ ├── nvp6158c.c ;具体的sensor驱动实现
│ │ ├── nvp6158_drv.c
│ │ ├── nvp6158_drv.h
│ │ ├── nvp6168_eq_table.h
│ │ ├── video_auto_detect.c
│ │ ├── video_auto_detect.h
│ │ ├── video.c
│ │ ├── video_eq.c
│ │ ├── video_eq.h
│ │ ├── video_eq_table.h
│ │ ├── video.h
│ ├── rn6854m_mipi.c ;具体的sensor驱动实现
│ ├── sensor-compat-ioctl32.c
│ ├── sensor_helper.c ;驱动函数接口的实现
│ ├── sensor_helper.h ;驱动函数接口的定义
├── modules.builtin
├── modules.order
├── platform
│ ├── platform_cfg.h ;vin平台配置文件
│ ├── sun50iw10p1_vin_cfg.h ;不同平台配置文件
│ ├── sun50iw3p1_vin_cfg.h ;不同平台配置文件
│ ├── sun50iw6p1_vin_cfg.h ;不同平台配置文件
│ ├── sun50iw9p1_vin_cfg.h ;不同平台配置文件
│ ├── sun8iw12p1_vin_cfg.h ;不同平台配置文件
│ ├── sun8iw15p1_vin_cfg.h ;不同平台配置文件
│ ├── sun8iw16p1_vin_cfg.h ;不同平台配置文件
│ └── sun8iw19p1_vin_cfg.h ;不同平台配置文件
├── top_reg.c
├── top_reg.h
├── top_reg_i.h
├── top_reg.o
├── utility
│ ├── bsp_common.c
│ ├── bsp_common.h
│ ├── bsp_common.o
│ ├── cfg_op.c ;读取ini文件的实现函数
│ ├── cfg_op.h ;读取ini文件的实现函数
│ ├── config.c ;sensor电压、通道选择、i2c地址等信息读取函数
│ ├── config.h ;sensor电压、通道选择、i2c地址等信息读取函数头文件
│ ├── vin_io.h ;vin模块寄存器操作头文件
│ ├── vin_os.c
│ ├── vin_os.h
│ ├── vin_supply.c
│ ├── vin_supply.h
├── vin.c
├── vin-cci
│ ├── bsp_cci.c ;底层cci bsp函数
│ ├── bsp_cci.h ;底层cci bsp函数头文件
│ ├── cci_helper.c ;cci 帮助函数,供sensor驱动调用
│ ├── cci_helper.h ;cci 帮助函数头文件
│ ├── csi_cci_reg.c ;cci硬件底层实现
│ ├── csi_cci_reg.h ;cci硬件底层实现头文件
│ ├── csi_cci_reg_i.h ;cci 寄存器资源头文件
│ ├── Kconfig
│ ├── sunxi_cci.c ;cci 平台驱动源文件
│ ├── sunxi_cci.h ;cci 平台驱动头文件
├── vin-csi
│ ├── parser_reg.c ;CSI控制函数
│ ├── parser_reg.h ;CSI控制函数头文件
│ ├── parser_reg_i.h ;CSI 寄存器值
│ ├── sunxi_csi.c ;csi 子模块驱动原文件
│ ├── sunxi_csi.h ;csi 子模块驱动头文件
├── vin.h
├── vin-isp
│ ├── isp500
│ │ ├── isp500_reg_cfg.c
│ │ ├── isp500_reg_cfg.h
│ │ ├── isp500_reg_cfg.o
│ │ └── isp500_reg.h
│ ├── isp520
│ │ ├── isp520_reg_cfg.c
│ │ ├── isp520_reg_cfg.h
│ │ └── isp520_reg.h
│ ├── isp521
│ │ ├── isp521_reg_cfg.c
│ │ ├── isp521_reg_cfg.h
│ │ └── isp521_reg.h
│ ├── isp522
│ │ ├── isp522_reg_cfg.c
│ │ ├── isp522_reg_cfg.h
│ │ └── isp522_reg.h
│ ├── isp_default_tbl.h
│ ├── sunxi_isp.c
│ ├── sunxi_isp.h
│ └── sunxi_isp.o
├── vin-mipi
│ ├── bsp_mipi_csi.c ;底层mipi bsp函数
│ ├── bsp_mipi_csi.h ;底层mipi bsp函数头文件
│ ├── bsp_mipi_csi_null.c ;底层mipi bsp空函数
│ ├── bsp_mipi_csi_v1.c ;底层mipi bsp函数--v1
│ ├── combo_common.h
│ ├── combo_csi
│ │ ├── combo_csi_reg.c
│ │ ├── combo_csi_reg.h
│ │ └── combo_csi_reg_i.h
│ ├── combo_rx
│ │ ├── combo_rx_reg.c
│ │ ├── combo_rx_reg.h
│ │ ├── combo_rx_reg_i.h
│ │ └── combo_rx_reg_null.c
│ ├── dphy
│ │ ├── dphy.h ;mipi dphy头文件
│ │ ├── dphy_reg.c ;mipi dphy底层实现函数
│ │ ├── dphy_reg.h ;mipi dphy底层实现函数头文件
│ │ └── dphy_reg_i.h ;mipi dphy 寄存器资源头文件
│ ├── protocol
│ │ ├── protocol.h ;mipi协议层头文件
│ │ ├── protocol_reg.c ;mipi协议层底层实现
│ │ ├── protocol_reg.h ;mipi协议层底层实现头文件
│ │ └── protocol_reg_i.h
│ ├── protocol.h
│ ├── sunxi_mipi.c
│ ├── sunxi_mipi.h
├── vin-stat
│ ├── vin_h3a.c ;3A控制接口函数
│ ├── vin_h3a.h ;3A控制接口函数头文件
├── vin-tdm
│ ├── tdm_reg.c ;TDM寄存器控制函数
│ ├── tdm_reg.h
│ ├── tdm_reg_i.h
│ ├── vin_tdm.c
│ └── vin_tdm.h
├── vin_test
│ ├── mplane_image
│ │ ├── csi_test_mplane.c ;camera抓图测试用例
│ │ └── Makefile ;测试用例编译文件
│ ├── sunxi_camera_v2.h
│ └── sunxi_display2.h
├── vin-video
│ ├── dma_reg.c ;csi dma寄存器控制函数
│ ├── dma_reg.h ;csi dma寄存器控制函数
│ ├── dma_reg_i.h ;csi dma 寄存器值定义头文件
│ ├── vin_core.c ;vin模块核心
│ ├── vin_core.h ;vin模块核心头文件
│ ├── vin_video.c ; 数据格式处理、pipe通道选择、Buffer管理等函数
│ ├── vin_video.h ;数据格式处理、pipe通道选择、Buffer管理等函数头文件
└── vin-vipp
├── sunxi_scaler.c ;图像压缩处理函数
├── sunxi_scaler.h ;图像压缩处理函数头文件
├── vipp_reg.c ;vipp寄存器控制函数
├── vipp_reg.h ;vipp寄存器控制函数头文件
├── vipp_reg_i.h ;vipp寄存器具体描述头文件