模块介绍
2 模块介绍
2.1 模块功能介绍
全志公司的 twi 总线兼容 i2c 总线协议,是一种简单、双向二线制同步串行总线。它只需要两根线即可在连接于总线上的器件之间传送信息。TWI 控制器支持的标准通信速率为 100kbps,最高通信速率可以达到 400kbps。全志的 twi 控制器支持一下功能:
• 支持主机模式和从机模式;
• 主机模式下支持 dma 传输;
• 主机模式下在多个主机的模式下支持总线仲裁;
• 主机模式下支持时钟同步,位和字节等待;
• 从机模式下支持地址检测中断;
• 支持 7bit 从机地址和 10bit 从机地址;
• 支持常规的 i2c 协议模式和自定义传输模式;
sunxi 平台支持多路 TWI,包含 TWI 与 S_TWI。
2.2 相关术语介绍
2.2.1 硬件术语
表 2-1: 硬件术语
| 相关术语 | 解释说明 |
|---|---|
| TWI | Two Wire Interface,全志平台兼容 I2C 标准协议的总线控制器 |
2.2.2 软件术语
表 2-2: 软件术语
| 相关术语 | 相关术语 |
|---|---|
| Sunxi | 全志科技使用的 linux 开发平台 |
| I2C_dapter | linux 内核中 I2C 总线适配器的抽象定义.IIC 总线的控制器,在物理上连接若干个 I2C 设备 |
| I2C_algorithm | linux 内核中 I2C 总线通信的抽象定义。描述 I2C 总线适配器与 I2C 设备之间的通信方法 |
| I2C Client | linux 内核中 I2C 设备的抽象定义 |
| I2C Driver | linux 内核中 I2C 设备驱动的抽象定义 |
2.3 模块配置介绍
在不同的 Sunxi 硬件平台中,TWI 控制器的数目不同;但对于同一块板子上的每一个 TWI 控制器来说, 模块配置类似,本小节展示 Sunxi 平台上的 TWI0 控制器配置(其他 TWI 控制器配置类似)。
2.3.1 device tree 默认配置
设备树中存在的是该类芯片所有平台的模块配置,设备树文件的路径为:{linux-ver}/arch/arm64(32 位平台为 arm)/boot/dts/sunxi(32 位系统无这目录)/xxxx.dtsi(CHIP 为研发代号,如sun50iw10p1 等), TWI 总线的设备树配置如下所示:
twi0: twi@0x05002000{
#address-cells = <1>;
#size-cells = <0>;
compatible = "allwinner,sun50i-twi"; //具体的设备,用于驱动和设备的绑定
device_type = "twi0"; //设备节点名称,用于sys_config.fex匹配
reg = <0x0 0x05002000 0x0 0x400>; //TWI0总线寄存器配置
interrupts = <GIC_SPI 6 IRQ_TYPE_LEVEL_HIGH>; //TWI0总线中断号、中断类型
clocks = <&clk_twi0>; //设备使用的时钟
clock-frequency = <400000>; //TWI0控制器的时钟频率
pinctrl-names = "default", "sleep"; //TWI0控制器使用的Pin脚名称,其中default为正常通 信时的引脚配置,sleep为睡眠时的引脚配置
pinctrl-0 = <&twi0_pins_a>; //TWI0控制器default时使用的pin脚配置
pinctrl-1 = <&twi0_pins_b>; //TWI0控制器sleep时使用的pin脚配置
twi_drv_used = <1>; //使用DMA传输数据
status = "disabled"; //TWI0控制器是否使能
};
在 linux-5.4 中,TWI 的配置与 linux-4.9 内核配置有些不同,区别主要体现在 clock 和 dma 的配置上:
twi0: twi@0x05002000{
#address-cells = <1>;
#size-cells = <0>;
compatible = "allwinner,sun20i-twi"; //具体的设备,用于驱动和设备的绑定
device_type = "twi0"; //设备节点名称,用于sys_config.fex匹配
reg = <0x0 0x02502000 0x0 0x400>; //TWI0总线寄存器配置
interrupts-extended= <&plic0 25 IRQ_TYPE_LEVEL_HIGH>; //TWI0总线中断号、中断类
clocks = <&ccu CLK_BUS_I2C0>;//twi控器使用的时钟
resets = <&ccu RST_BUS_I2C0>;//twi控器使用的reset时钟
clock-names = "bus";
clock-frequency = <400000>; //TWI0控制器的时钟频率
dmas = <&dma 43>, <&dma 43>;//TWI0控制器的dma通道号
dma-names = "tx", "rx";
status = "disabled";//TWI0控制器是否使能
};
为了在 TWI 总线驱动代码中区分每一个 TWI 控制器,需要在 Device Tree 中的 aliases 节点中为每一个 TWI 节点指定别名:
别名形式为字符串 “twi” 加连续编号的数字,在 TWI 总线驱动程序中可以通过 of_alias_get_id()函数获取对应 TWI 控制器的数字编号,从而区别每一个 TWI 控制器。
其中 twi0_pins_a, twi0_pins_b 为 TWI 的引脚配置的配置节点。linux4.9 中 该 配 置 的 路 径 为 arch/arm64(32 位 平 台 为 arm)/boot/dts/sunxi/xxxxpinctrl.dtsi(CHIP 为研发代号,如 sun50iw10p1 等),具体配置如下所示:
twi0_pins_a: twi0@0 {
allwinner,pins = "PD14", "PD15"; //TWI控制器使用的引脚
allwinner,pname = "twi0_scl", "twi0_sda"; //TWI控制器的引脚功能说明
allwinner,function = "twi0"; //引脚功能描述
allwinner,muxsel = <4>; //引脚复用功能配置
allwinner,drive = <0>; //io驱动能力
allwinner,pull = <0>; //内部电阻状态
};
twi0_pins_b: twi0@1 {
allwinner,pins = "PD14", "PD15";
allwinner,function = "io_disabled";
allwinner,muxsel = <7>;
allwinner,drive = <1>;
allwinner,pull = <0>;
};
linux-5.4 中该配置的路径为 arch/arm64(32 位平台为 arm)/boot/dts/sunxi/xxxx.dtsi(CHIP为研发代号,如 sun50iw10p1 等),具体如下所示:
twi0_pins_a: twi0@0 {
pins = "PH0", "PH1";
function = "twi0";
drive-strength = <10>;
};
twi0_pins_b: twi0@1 {
pins = "PH0", "PH1";
function = "gpio_in";
}
另外 clk_twi0 为时钟的配置。
在 linux-4.9 中, 路 径 为 arch/arm64(32 位 平 台 为 arm)/boot/dts/sunxi/XXXXclk.dtsi(CHIP 为研发代号,如 sun50iw10p1 等),具体配置如下所示:
clk_twi0: twi0 {
#clock-cells = <0>;
compatible = "allwinner,periph-clock";
clock-output-names = "twi0"; //指定clock名称,用于匹配clock配置
};
在 linux-5.4 中,无需配置。
2.3.2 board.dts 板级配置
board.dts 用于保存每一个板级平台的设备信息(如 demo 板,perf1 板,ver1 板等等),里面的配置信息会覆盖上面的 device tree 默认配置信息。board.dts 的路径为 longan/device/config/chips/IC/configs/BOARD/board.dts,
在 linux-4.9 中,对应 board.dts 里面 TWI0 的具体配置如下:
twi0_pins_a: twi0@0 {
allwinner,pins = "PA0", "PA1";
allwinner,pname = "twi0_scl", "twi0_sda";
allwinner,function = "twi0";
allwinner,muxsel = <4>;
allwinner,drive = <1>;
allwinner,pull = <0>;
};
twi0_pins_b: twi0@1 {
allwinner,pins = "PA0", "PA1";
allwinner,function = "io_disabled";
allwinner,muxsel = <7>;
allwinner,drive = <1>;
allwinner,pull = <0>;
};
twi0: twi@0x05002000{
clock-frequency = <400000>; //i2c时钟频率为400K
pinctrl-0 = <&twi0_pins_a>;
pinctrl-1 = <&twi0_pins_b>;
status = "okay"; //使能TWI0
};
在 linux-5.4 中,对应 board.dts 里面 TWI0 的具体配置如下:
&twi0 {
clock-frequency = <400000>;
pinctrl-0 = <&twi0_pins_a>;
pinctrl-1 = <&twi0_pins_b>;
pinctrl-names = "default", "sleep";
status = "disabled";
eeprom@50 {
compatible = "atmel,24c16";
reg = <0x50>;
status = "disabled";
};
};
其中,TWI 速率由 “clock-frequency” 属性配置,最大支持 400K。
对于 TWI 设备,可以把设备节点填充作为 Device Tree 中相应 TWI 控制器的子节点。TWI 控制器驱动的 probe 函数透过 of_i2c_register_devices() ,自动展开作为其子节点的 TWI 设备。
对于 twi0 中引用的 pin 口,具体的配置如下:
twi0_pins_a: twi0@0 {
pins = "PB10", "PB11"; /*sck sda*/
function = "twi0";
drive-strength = <10>;
};
twi0_pins_b: twi0@1 {
pins = "PB10", "PB11";
function = "gpio_in";
};
2.3.3 kernel menuconfig 配置
在 longan 中,linux-4.9 在 命 令 行 进 入 内 核 根 目 录 (/kernel/linux-4.9), 执 行 make ARCH=arm64 menuconfig (32 位平台执行:make ARCH=arm menuconfig) 进入配置主界面,并按以下步骤操作 (linux-5.4 在根目录中执行./build.sh menuconfig)在 tina 中,可以直接在根目录里面执行 make kernel_menuconfig 进入 menuconfig 配置界面。
• 1. 选择 Device Drivers 选项进入下一级配置,如下图所示。

图 2-1: Device Driver
• 2. 选择 I2C support 选项,进入下一级配置,如下图所示。
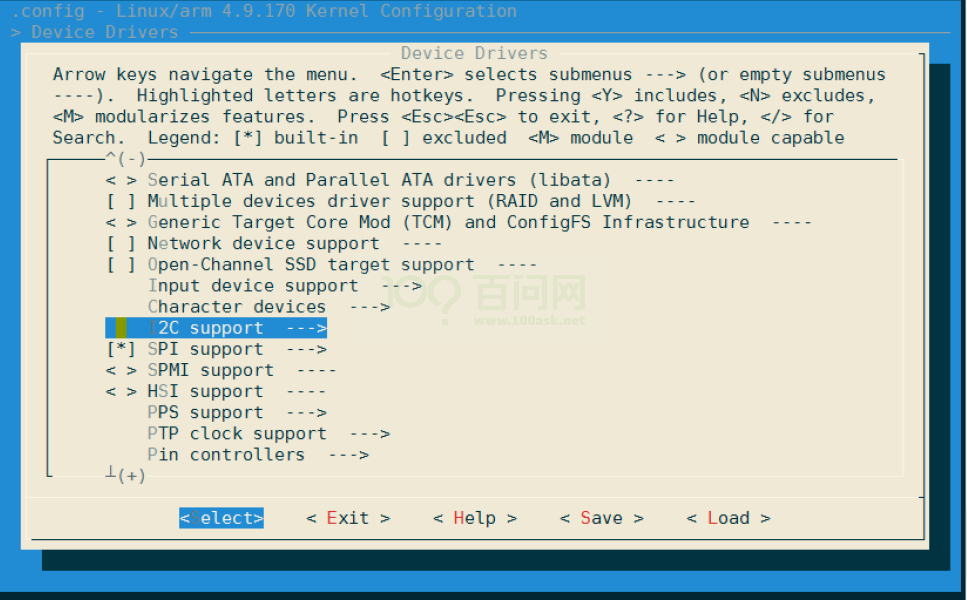
图 2-2: I2C support
• 3. 配置用户 I2C 接口,选择 I2C device interface,如下图所示。
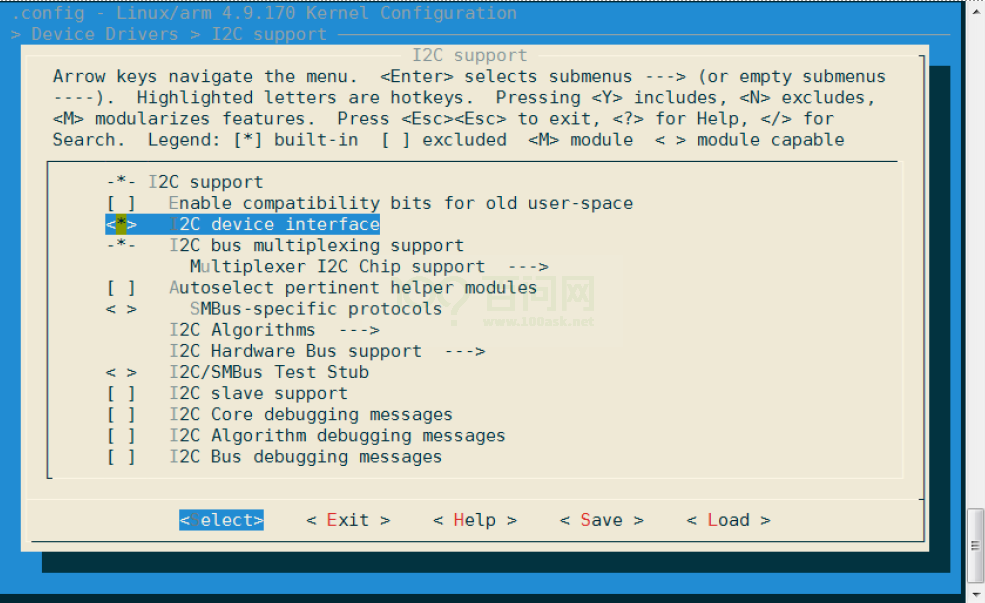
图 2-3: I2C device interface
• 4. 选择 I2C HardWare Bus support 选项,进入下一级配置,如下图所示。
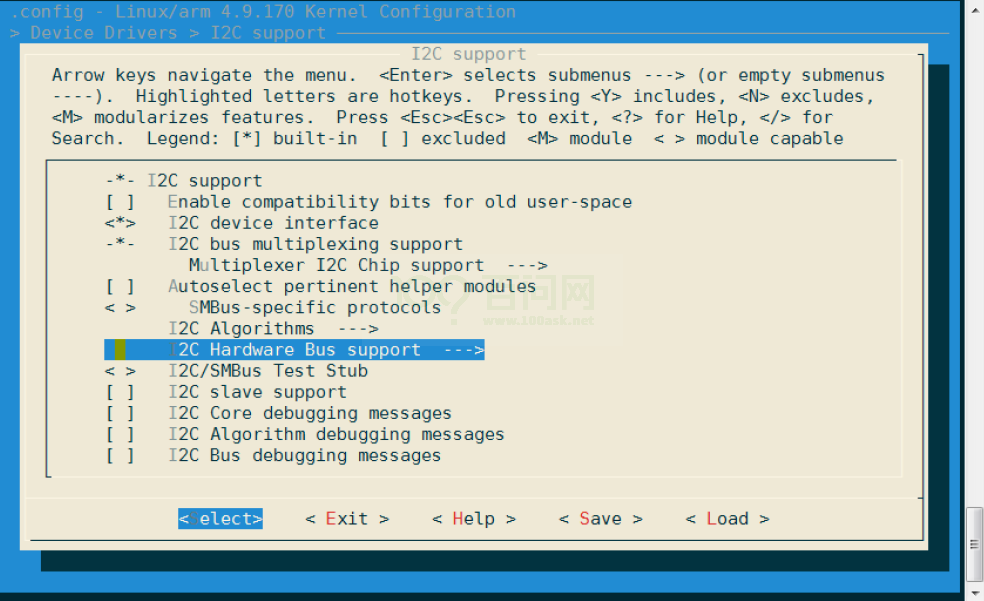
图 2-4: I2C HardWare Bus support
• 5. 选择 SUNXI I2C controller 选项,可选择直接编译进内核,也可编译成模块。如下图所示。
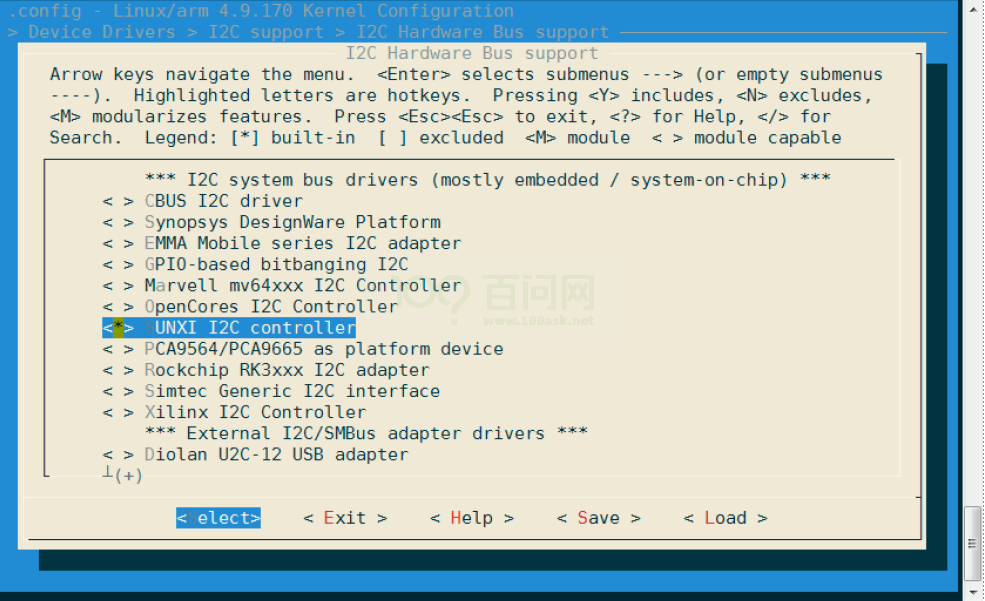
图 2-5: SUNXI I2C controller
2.4 源码模块结构
I2C 总线驱动的源代码位于内核在 drivers/i2c/busses 目录下:
kernel/linux-4.9/drivers/i2c/
├── busses
│ ├── i2c-sunxi.c // Sunxi平台的I2C控制器驱动代码
│ ├── i2c-sunxi.h // 为Sunxi平台的I2C控制器驱动定义了一些宏、数据结构
│ ├── i2c-sunxi-test.c // Sunxi平台的i2c设备测试代码,5.4下暂未适配
├── i2c-core.c // I2C子系统核心文件,提供相关的接口函数
├── i2c-dev.c // I2C子系统的设备相关文件,用以注册相关的设备文件,方便调试
2.5 驱动框架介绍
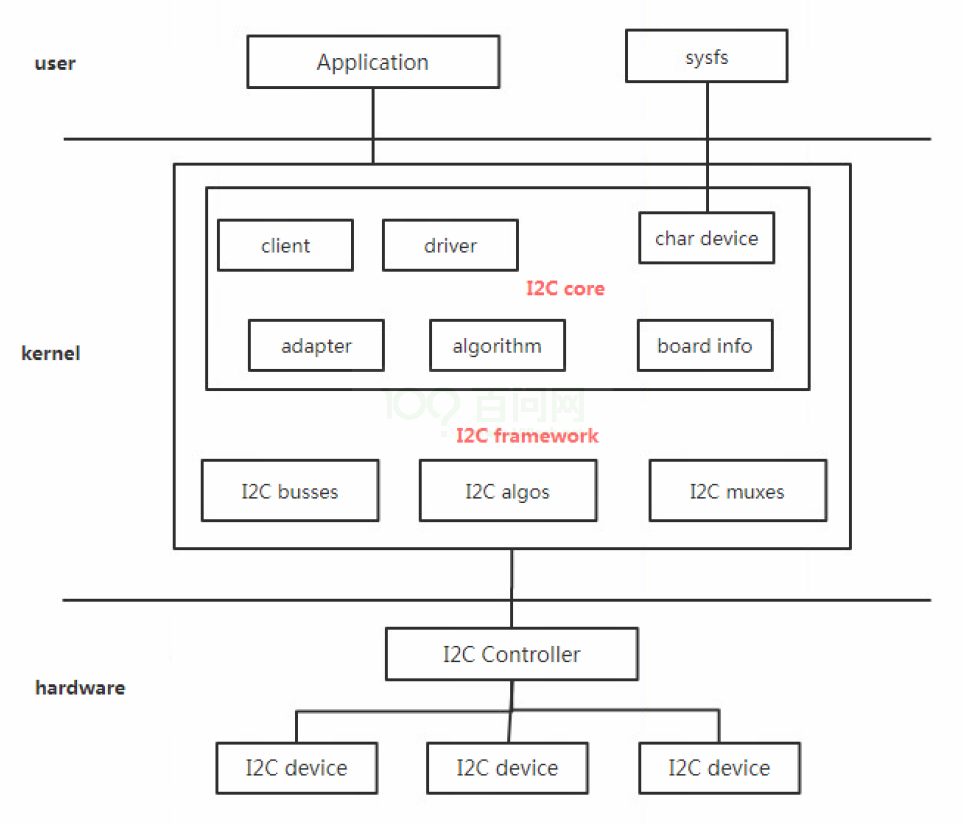
图 2-6: TWI 模块结构框图
Linux 中 I2C 体系结构上图所示,图中用分割线分成了三个层次:1. 用户空间,包括所有使用I2C 设备的应用程序;2. 内核,也就是驱动部分;3. 硬件,指实际物理设备,包括了 I2C 控制器和 I2C 外设。
其中,Linux 内核中的 I2C 驱动程序从逻辑上又可以分为 6 个部分:
-
I2C framework 提供一种 “访问 I2C slave devices” 的方法。由于这些 slave devices 由I2C controller 控制,因而主要由 I2C controller 驱动实现这一目标。
-
经过 I2C framework 的抽象,用户可以不用关心 I2C 总线的技术细节,只需要调用系统的接口,就可以与外部设备进行通信。正常情况下,外部设备是位于内核态的其它 driver(如触摸屏,摄像头等等)。I2C framework 也通过字符设备向用户空间提供类似的接口,用户空间程序可以通过该接口访问从设备信息。
-
在 I2C framework 内部,有 I2C core、I2C busses、I2C algos 和 I2C muxes 四个模块。
-
I2C core 使用 I2C adapter 和 I2C algorithm 两个子模块抽象 I2C controller 的功能,使用 I2C client 和 I2C driver 抽象 I2C slave device 的功能(对应设备模型中的 device 和 device driver)。另外,基于 I2C 协议,通过 smbus 模块实现 SMBus(System Management Bus,系统管理总线)的功能。
-
I2C busses 是各个 I2C controller drivers 的集合,位于 drivers/i2c/busses/目录下,i2c-sunxi-test.c、i2c-sunxi.c、i2c-sunxi.h。
-
I2C algos 包含了一些通用的 I2C algorithm,所谓的 algorithm,是指 I2C 协议的通信方法,用于实现 I2C 的 read/write 指令,一般情况下,都是由硬件实现,不需要特别关注该目录。